W artykule wyjaśniono prosty obwód pojazdu popychacza linii, znany również jako pojazd do śledzenia linii, wykorzystujący tylko kilka wzmacniaczy operacyjnych i kilku innych komponentów, bez użycia złożonego Arduino lub mikrokontrolerów.
Co to jest pojazd z popychaczem liniowym
Pojazd podążający za linią to forma automatycznego pojazdu kierowanego (AGV), który porusza się po wykryciu białej linii narysowanej lub osadzonej na ziemi. Sygnał z detektorów nakazuje napędzanym kołom automatyczne obracanie i regulację zgodnie z linią, dając wrażenie, że pojazd podąża za linią. Stąd zwolennik linii nazwy.
Zasadniczo detektory mają postać fotorezystory, takie jak LDR lub półprzewodnikowe detektory światła, takie jak fotodiody lub fototranzystory .
Kilka takich detektory światła są używane, które wykrywają światło odbite od białej linii i przełączają obwód tranzystorowy lub komparatory oparte na wzmacniaczu operacyjnym, które z kolei sterują silnikami kół pojazdu, aby manewrować zgodnie z zakrętami i krzywymi białej linii na ziemi.
Korzystanie z komparatorów okien
W proponowanym obwodzie pojazdu popychacza linii zastosowaliśmy kilka komparatory wzmacniacza operacyjnego angażował silniki w balansowanie.
Wzmacniacze operacyjne są ustawione jako okno udziałowcy . Jak sama nazwa wskazuje, komparator okienkowy porównuje sygnał wejściowy z detektorów z dwoma odniesieniami skrajnego napięcia, które stanowią progi „okna”. Dopóki poziom sygnału wejściowego mieści się w zakresie progów odniesienia „okna”, wyjście obu wzmacniaczy operacyjnych zachowuje wysoką logikę na swoich wyjściach.
Jednak w przypadku, gdy sygnał wejściowy ma tendencję do przekraczania progów odniesienia, odpowiednie wyjście wzmacniacza operacyjnego zmienia stan na niski, co skutkuje przeciwnymi wyjściami ze wzmacniaczy operacyjnych. Ta asymetria skłania urządzenia wyjściowe do skorygowania sytuacji poprzez odpowiednie przełączanie obciążeń.
Jak działa obwód
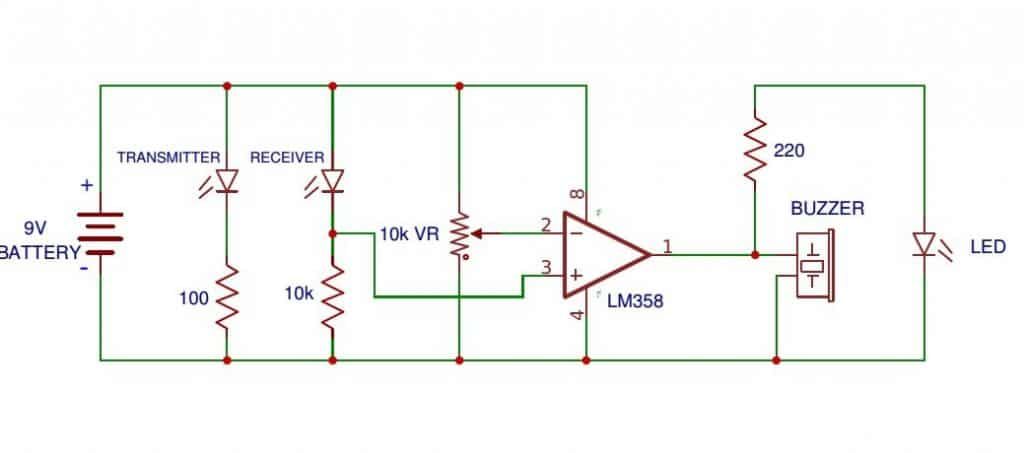
Odnosząc się do schematu obwodu pojazdu popychacza linii poniżej, widzimy dwa wzmacniacze operacyjne skonfigurowane jako komparatory okien.

Wzmacniacze operacyjne mogą pochodzić z układu scalonego LM358 lub LM324
Górny wzmacniacz operacyjny jest podłączony do sterowania górną wartością progową, podczas gdy dolny wzmacniacz operacyjny jest podłączony do sterowania dolną wartością progową.
Odwracające wejście wzmacniacza operacyjnego A1 i nieodwracające wejście wzmacniacza operacyjnego A2 są stabilizowane stałym napięciem odniesienia
Wejście nieodwracające wzmacniacza operacyjnego A1 i wejście odwracające wzmacniacza operacyjnego A2 są ze sobą powiązane i wykorzystywane do wykrywania zmian sygnału wejściowego z detektorów światła.
Dwa rezystory zależne od światła, LDR1 i LDR2, które działają jak urządzenia światłoczułe, są ustawione jako detektory światła, dzięki czemu odbierają równomiernie odbite światło z białej linii na nich.
Dopóki światło na LDR jest odpowiednio wysokie i jednolite, pin 3 A1 pozostaje wyżej niż jego pin2, ponieważ LDR1 jest połączony linią dodatnią. To powoduje, że jego wydajność rośnie.
Podobnie, pin 6 A2 jest utrzymywany niżej niż jego pin5 ze względu na połączenie LDR2 z linią uziemienia, co umożliwia utrzymanie wysokiego poziomu wyjścia A2.
Innymi słowy, gdy LDR świecą równomiernie, nieodwracające (+) wejścia obu wzmacniaczy operacyjnych są utrzymywane wyżej niż ich odwracające (-) wejścia, co powoduje, że ich wyjścia stają się wysokie.
Przy obu wyjściach na wysokim poziomie sterowniki tranzystorowe zapewniają równomierną pracę odpowiednich silników, co odpowiednio umożliwia płynną jazdę pojazdu po linii prostej.
Jak pojazd podąża za linią
Kiedy napotkana jest zakrzywiona biała linia, jeden z LDR odchyla się od linii, powodując różnicę światła w punkcie A obwodu. To z kolei powoduje obniżenie odpowiedniego wyjścia wzmacniacza operacyjnego i chwilowe zatrzymanie odpowiedniego silnika.
W tej sytuacji, silnik drugiej strony, który nadal działa, zmusza pojazd do skręcenia w kierunku kąta zgięcia linii, co powoduje powrót zacienionego LDR do oświetlonego obszaru białej linii. Kiedy tak się stanie, oba silniki ponownie zaczynają działać, umożliwiając normalną pracę pojazdu.
Powyższe automatyczne włączanie / wyłączanie lewych / prawych silników w odpowiedzi na odchylenia światła od zakrzywionych białych linii zmusza pojazd do ciągłej regulacji i manewrowania zgodnie z białą linią.
Jak zbudować pojazd
W jednym z moich wcześniejszych postów dowiedzieliśmy się, jak plik prosty pojazd zdalnie sterowany można zbudować przy użyciu zaledwie kilku silników przymocowanych do tylnej krawędzi prostokątnej deski i pary atrapy kół na przedniej krawędzi deski.

W przypadku proponowanego obwodu pojazdu z popychaczem liniowym stosujemy podobną konstrukcję pojazdu, jak pokazano na powyższym rysunku.
Układ wygląda dość prosto, tylne koła są połączone silnikami, które są kontrolowane przez sterowniki tranzystorowe na wyjściach wzmacniacza operacyjnego.
Kiedy pojazd odbiega od linii, różnica w poziomie światła na LDR wyłącza jeden ze wzmacniaczy operacyjnych, zatrzymując odpowiedni silnik.
Zmusza to działający silnik po przeciwnej stronie do obracania się w stronę zatrzymanego silnika, co oznacza, że jeśli silnik po lewej stronie jest hamowany, pojazd będzie zmuszony skręcić w lewo, dostosowując się do linii zginania, w tym samym kierunku.
Sugeruje to również, że integracja lewego / prawego silnika z wyjściami wzmacniacza operacyjnego powinna być odpowiednio wykonana, tak aby kierunek zginania linii i silnik, który jest zatrzymywany, znajdowały się po tej samej stronie pojazdu.
Jak ustawić LDR
Ponieważ oba LDR (LDR1 i LDR2) mają równomiernie wyczuwać odbijane światło z białej linii, ich orientacja powinna być prostopadła do długości linii, jak pokazano poniżej.

Tutaj założyliśmy, że pojazd porusza się od prawej do lewej, podążając wyznaczoną linią na tej samej ścieżce.
Całkowita szerokość LDR powinna mieścić się w szerokości linii.
LDR i diodę LED należy zamontować na dolnej powierzchni pojazdu, a najlepiej z tyłu, tuż pod zestawem tylnych kół.
Wskazana dioda to biała dioda LED z szeregowym rezystorem 1K. Musi być umieszczony blisko LDR i pośrodku, tak aby światło z LDR nie docierało bezpośrednio do LDR, zamiast tego powinno docierać do LDR poprzez odbicie od białej linii pod nimi.
Specyfikacje silnika
Silniki mogą być dowolnego typu szczotkowanego z magnesami trwałymi, ale powinny być wyposażone w skrzynię biegów, aby zapewnić odpowiednio powolny i stabilny ruch pojazdu.
Moc silnika powinna odpowiadać obciążeniu, które ma przenosić pojazd. Można to sprawdzić w praktycznych eksperymentach.
Jak skonfigurować
Aby ustawić ten obwód pojazdu popychacza linii, będziesz musiał ułożyć mały pasek białej linii namalowany na płaskiej powierzchni lub białą taśmę przyklejoną do płaskiej powierzchni.
Ustaw system (bez kół) nad linią, jak pokazano na poprzednim schemacie, tak aby LDR i dioda LED są prawidłowo dopasowane wewnątrz szerokości linii.
Włącz zasilanie, biała dioda LED powinna jasno oświetlać obszar pod nią. Dostosuj dwa ustawienia wstępne, aż oba silniki zostaną włączone jednocześnie.
Teraz przesuń urządzenie nieco w prawo, tak aby LDR1 wyszedł z białej linii.
Lewy silnik powinien się zatrzymać. Jeśli tak się nie stanie, wyreguluj P1, aż lewy silnik po prostu się zatrzyma.
Następnie przesuń jednostkę nieco w lewo, tak aby LDR2 wyszedł z białej linii. Powinno to zatrzymać silnik po prawej stronie. Jeśli tak się nie stanie, dostosuj ustawienie 10k, aż silnik po prawej stronie po prostu się zatrzyma.
Zakończy to procedurę konfiguracji, a teraz możesz zainstalować koła na silnikach i używać tego kierowanego pojazdu do automatycznego podążania po wyznaczonym torze na ziemi.
Biała linia vs czarna linia
Proponowany system pojazdu z podążaniem za linią opiera się na białej linii osadzonej na ziemi zamiast czarnej. Zalety używania białej linii zamiast czarnej linii są następujące:
Biała linia wygląda bardziej elegancko i przyzwoicie w porównaniu z czarną linią.
Oparty na białej linii układ śledzący może pracować nawet w całkowitej ciemności lub przy słabym oświetleniu otoczenia. Konstrukcje oparte na czarnym świetle zwykle wymagają zewnętrznego oświetlenia, aby pojazd był sprawny.
AGV oparty na białej linii działa dokładniej niezależnie od koloru płytki, z wyjątkiem płytek, które są wyjątkowo białe lub równoważne z kolorem białej linii.
Przekształcenie pojazdu w popychacz czarnej linii
Pomimo powyższych zalet, jeśli użytkownik woli, aby pojazd poruszał się po czarnej linii, system można łatwo przekształcić w taki sposób, aby zrobić to poprzez kilka szybkich modyfikacji w proponowanym projekcie.
Użytkownik po prostu zamienia lub zamienia połączenia pinów wejściowych wzmacniaczy operacyjnych z ustawieniami wstępnymi i usuwa diodę LED związaną z LDR.
Poprzedni: 50-watowy obwód sinusoidalny UPS Dalej: Objaśnienie podstawowych obwodów elektronicznych - przewodnik dla początkujących po elektronice