W poście wyjaśniono, jak zrobić tani, ale potężny zdalnie sterowany wózek, który może być manewrowany w lewo, w prawo, do przodu i do tyłu, zgodnie z wymaganiami, przez użytkownika za pomocą danego pilota. Pomysł nie opiera się na obwodzie mikrokontrolera.
W jednym z moich poprzednich postów omówiłem plik prosty zdalnie sterowany obwód samochodzika , obecny pomysł zdalnie sterowanego wózka jest inspirowany tą samą koncepcją, ale jest przeznaczony do przewożenia potężnych i znacznie cięższych ładunków.
Zdalnie sterowany wózek do sklepów detalicznych
Ten projekt może być szczególnie dostosowany i nadający się do zastosowania w centrach handlowych lub sklepach detalicznych, gdzie można go zrealizować jako mały pojazd transportowy do transportu materiału w obrębie kompleksu lub lokalu za pomocą kilku pras zdalnej jednostki Tx.
Pierwszym krokiem w budowie proponowanego zdalnie sterowanego wózka byłoby zakupienie zestawu standardowych modułów Rx / Tx RF u lokalnego sprzedawcy elektronicznego lub w dowolnym sklepie internetowym, polecam zakup w sklepie internetowym, ponieważ byłoby to znacznie łatwiejsze i wygodniejsze , choć droższe.
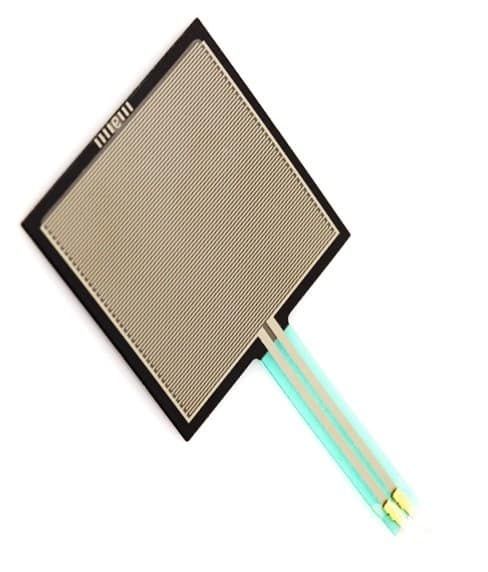
Zakupione jednostki wyglądałyby tak, jak pokazano poniżej:
Korzystanie z modułów 433 MHz Tx, Rx

Zespół koloru brązowego po lewej stronie to Tx lub nadajnik, podczas gdy sąsiedni obwód szeroki to Rx lub odbiornik.
Jednostka Tx jest widoczna z 4 czerwonymi przyciskami oznaczonymi jako A, B, C, D, a tablica Rx może być świadkiem z 4 przekaźnikami (czarne pola).
Cztery odpowiednie przyciski modułu Tx są połączone bezprzewodowo w celu obsługi czterech odpowiednich przekaźników modułu Rx.
Widać złącza zamocowane na krawędziach płytki (kolor zielony), złącza te są odpowiednio zakończone wejściami (+) (-) zasilania karty Rx, a także stykami przekaźników dla wszystkich 4 przekaźników.
Przekaźnik, jak wszyscy wiemy, składa się z 5 podstawowych styków i ich wyprowadzeń, a mianowicie: 2 piny dla cewki, po jednym dla bieguna i po jednym dla N / C i N / O.
Ponieważ w jednostce Rx są 4 przekaźniki, będziesz mógł znaleźć 5 x 4 = 20 wyjść skojarzonych z odpowiednimi punktami złączy.
Oddzielne wyśledzenie tych zakończeń przekaźników na złączach mogłoby być żmudnym zadaniem, dlatego polecam lutowanie przewodów bezpośrednio na pinoutach przekaźnika, aby uchronić się przed powyższym zadaniem, ten wysiłek będzie potrzebny później, gdy będziemy angażować jednostkę obwód sterowniczy wózka.
Budowa obwodu sterującego przekaźnika dla wózka
W tym celu będziesz potrzebować kilku przekaźników i diod. Przekaźniki powinny być odpowiednio dobrane, aby mogły obsługiwać silniki kół wózka o dużej mocy. Zalecam użycie do tego przekaźników marki OEN, jak pokazano na poniższym obrazku:

Diody które będą wymagane w obwodzie sterownika przekaźnika mogą być naszymi standardowymi diodami 1N4007.
Szczegóły obwodu tego samego można zobaczyć na poniższym schemacie:
Szczegóły i schemat okablowania przekaźnika


Jak działa obwód zdalnego wózka
Używając wyżej wymienionych przekaźników i diod, będziesz musiał dokończyć budowę powyższej płytki drukowanej sterownika przekaźnika, co można po prostu zrobić na kawałku płytki veroboard.
Następnie mamy do dyspozycji główne zadanie polegające na zintegrowaniu zielonych przewodów pokazanych na powyższym schemacie z płytką pilota Rx.
Przed integracją będziemy musieli wstawić kilka modów do modułu Rx, jak wyjaśniono poniżej:
Używając kawałków izolowanych przewodów, odpowiednio odizolowanych i ocynowanych na końcach, należy połączyć (poprzez lutowanie) wszystkich pinów biegunowych przekaźnika i połączyć to wspólne złącze z linią dodatnią płytki Rx.
Teraz w tej sytuacji możemy założyć, że gdy przekaźniki nie są w stanie aktywnym (przez zdalną słuchawkę), wejście bieguna dodatniego każdego przekaźnika zostanie połączone z odpowiednimi punktami N / C, a po aktywacji dodatni z bieguna przesuń i połącz się z odpowiednimi punktami N / O.
Krótko mówiąc, po aktywacji styk N / O otrzyma dodatnie zasilanie i dlatego jesteśmy zainteresowani tym dodatnim zasilaniem ze styków N / O, ponieważ zostaną one zainicjowane tylko wtedy, gdy przekaźniki zostaną aktywowane, co oznacza, że gdy Tx (nadajnik ).
Dlatego wszystkie odpowiednie wyprowadzenia N / O muszą być podłączone do zielonych przewodów wskazanego powyżej obwodu sterownika przekaźnika.
Po wykonaniu tej czynności Rx zostanie zintegrowany z modułem sterownika przekaźnika do wykonywania wszystkich zamierzonych manewrów zdalnie sterowanego wózka, czyli: do przodu, do tyłu, ruchy oraz skręty w lewo iw prawo.
Zasilanie płytki sterownika przekaźnika
Ponieważ przekaźniki w stopniu sterownika przekaźnika byłyby odpowiedzialne za przemieszczanie ciężkich silników połączonych z kołem wózka, zasilanie do tego musiałoby być równie mocne, dlatego akumulatory kwasowo-ołowiowe o głębokim cyklu idealnie nadają się do tego zastosowania.
Zakładając, że silniki mają mieć napięcie znamionowe 12 V, akumulator kwasowo-ołowiowy 40 Ah byłby wystarczająco dobry, aby umożliwić poruszanie się wózka nawet z cięższymi ładunkami.
Konfiguracja kół z silnikami do zamierzonych manewrów
Jak można zidentyfikować na poniższym rysunku, omawiany zdalnie sterowany wózek będzie wymagał 4 kółek do przenoszenia i toczenia systemu.
Jednak tylko dwa przednie koła byłyby odpowiedzialne za umożliwienie zamierzonych manewrów do tyłu, do przodu, w prawo i w lewo, dlatego silniki musiałyby być zaciśnięte tymi dwoma przednimi kołami wózka, jak pokazano na poniższym obrazku:

Konfiguracja połączeń kółek wózka
Tylne koła to po prostu fałszywe koła, zamocowane tylko w celu umożliwienia swobodnego toczenia wózka, w odpowiedzi na polecenia przedniego koła.
Jak widać na powyższym obrazku, moduł oznaczony jako zespół PCB to płytka sterownika przekaźnika, moduł zdalny to płytka zdalnego odbiornika Rx, natomiast bateria to bateria 40 AH 12V, o której mówiliśmy w poprzednim rozdziale artykułu.
Po złożeniu może zajść potrzeba poprawienia i sprawdzenia połączeń przewodów silnika z płytą sterownika przekaźnika.
W przypadku ruchu do przodu i do tyłu oba silniki muszą być ze sobą zsynchronizowane, z drugiej strony, aby wykonać przewrót w prawo lub w lewo, silniki muszą wykonać przeciwny ruch obrotowy.
Jeśli okaże się, że silnik nie zachowuje się w powyższy sposób, najprawdopodobniej można to naprawić, po prostu zmieniając polaryzację jednego z silników. To natychmiast poprawi sytuację i zmusi silniki do wykonania określonych manewrów.
Wreszcie przyciski A.B, C, D mogą być odpowiednio dopasowane lub zamienione na potrzeby dowolnego z odpowiednich manewrów, dostosowując połączenia zielonego przewodu z modułem Rx, zgodnie z osobistymi preferencjami użytkownika.
Poprzedni: Jak zmodyfikować SMPS pod kątem regulowanego prądu i napięcia wyjściowego Dalej: Czujnik mikrofalowy lub obwód czujnika dopplerowskiego