Wprowadzenie
Jednofazowe silniki indukcyjne są szeroko stosowane w urządzeniach i sterowaniu przemysłowym. Jednofazowy silnik indukcyjny ze stałym kondensatorem (PSC) jest najprostszym i najczęściej stosowanym silnikiem tego typu.
Z założenia silniki PSC są jednokierunkowe, co oznacza, że są zaprojektowane do obracania się w jednym kierunku. Poprzez dodanie dodatkowych uzwojeń i zewnętrznych przekaźników i przełączników lub za pomocą mechanizmów przekładniowych można zmienić kierunek obrotów. W tym pomyśle omówimy szczegółowo, jak sterować prędkością silnika PSC w obu kierunkach za pomocą mikrokontrolera PIC16F72 i elektroniki mocy.
Mikrokontroler PIC16F72 został wybrany, ponieważ jest jednym z najprostszych i najtańszych mikrokontrolerów ogólnego przeznaczenia, jakie firma Microchip ma w swoim portfolio. Mimo że nie ma sprzętowych PWM do sterowania dodatkowymi wyjściami PWM z wstawionym pasmem nieczułości, wszystkie PWM są generowane w oprogramowaniu układowym za pomocą timerów i wyprowadzane do pinów wyjściowych ogólnego przeznaczenia.
Co to jest napęd o zmiennej częstotliwości?
Napęd o zmiennej częstotliwości lub VFD to sposób, który umożliwia sterowanie prędkością silnika indukcyjnego poprzez zastosowanie zmiennej częstotliwości napięcia zasilania AC. Kontrolując wyjściową częstotliwość AC, można sterować silnikiem z różnymi prędkościami w zależności od wymagań. Są to napędy o regulowanej prędkości, szeroko stosowane w zastosowaniach przemysłowych, takich jak pompy, systemy wentylacyjne, windy, napędy obrabiarek itp. Jest to zasadniczo system oszczędzający energię. Dlatego pierwszym wymaganiem jest wygenerowanie fali sinusoidalnej o różnych częstotliwościach dla VFD.
Jaka jest technologia zastosowana w VFD?
Jest to system, który dostarcza prąd zmienny o zmiennej częstotliwości w celu sterowania prędkością silnika w zależności od potrzeb. Jednofazowe przemienniki częstotliwości są bardziej powszechne, ponieważ większość urządzeń pracuje przy zasilaniu jednofazowym AC. Składa się z pełnookresowego prostownika mostkowego do konwersji 230/110 V prądu przemiennego na około 300/150 V prądu stałego. Wyjście DC z prostownika mostkowego jest wygładzane przez kondensator wygładzający o dużej wartości, aby usunąć tętnienia prądu przemiennego. Ten stały prąd stały jest następnie podawany do obwodu generującego częstotliwość utworzonego z tranzystorów MOSFET (tranzystor polowy z tlenkiem metalu) / IGBT (tranzystor bipolarny z izolowaną bramką). Ten obwód MOSFET / IGBT odbiera prąd stały i przekształca go na prąd przemienny o zmiennej częstotliwości, aby kontrolować prędkość urządzenia.
Zmianę częstotliwości można uzyskać za pomocą układów elektronicznych lub mikrokontrolera. Ten obwód zmienia częstotliwość napięcia (PWM) przyłożonego do napędu bramki obwodu MOSFET / IGBT. Tak więc na wyjściu pojawia się napięcie przemienne o zmiennej częstotliwości. Mikrokontroler można zaprogramować tak, aby zmieniał częstotliwość wyjścia w zależności od potrzeb.
System VFD:
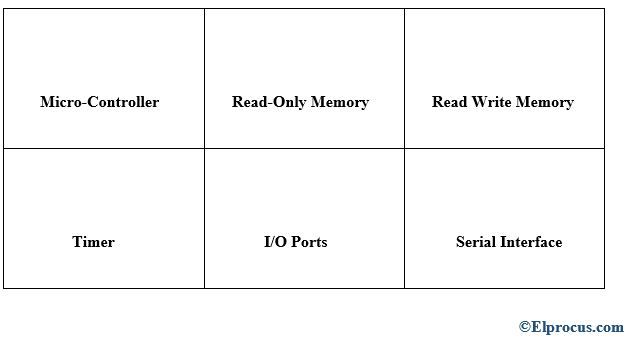
Urządzenie o zmiennej częstotliwości składa się z trzech części, takich jak silnik prądu przemiennego, kontroler i interfejs operacyjny.
Silnik prądu przemiennego używany w przemiennikach częstotliwości jest generalnie trójfazowym silnikiem indukcyjnym, nawet jeśli jest jednofazowy silnik jest używany w niektórych systemach. Zwykle stosuje się silniki zaprojektowane do pracy ze stałą prędkością, ale niektóre konstrukcje silników zapewniają lepszą wydajność w VFD niż konstrukcja standardowa.
Część kontrolera to stały elektroniczny obwód konwertera mocy, który przekształca prąd przemienny w prąd stały, a następnie w prąd przemienny quasi-sinusoidalny. Pierwsza część to sekcja przetwornicy AC na DC, która ma pełnookresowy mostek prostowniczy, zwykle trójfazowy / jednofazowy mostek pełnookresowy. Ten element pośredni DC jest następnie przekształcany w quasi-sinusoidalny prąd przemienny za pomocą obwodu przełączającego falownika. Tutaj tranzystory MOSFET / IGBT są używane do odwracania prądu stałego na prąd przemienny.
Sekcja falownika przekształca prąd stały na trzy kanały prądu przemiennego do napędzania silnika trójfazowego. Sekcja kontrolera może być również zaprojektowana tak, aby zapewnić lepszy współczynnik mocy, mniejsze zniekształcenia harmoniczne i niską czułość na wejściowe stany przejściowe AC.
Sterowanie napięciem / Hz:
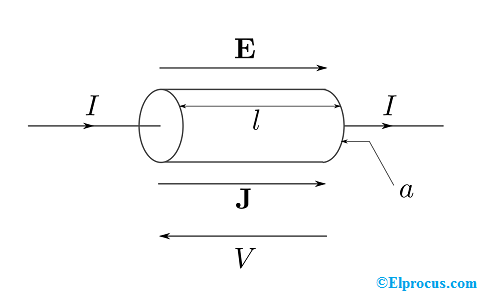
Obwód sterownika reguluje częstotliwość prądu przemiennego dostarczanego do silnika za pomocą metody sterowania woltami na Hz. Silnik prądu przemiennego wymaga zmiennego przyłożonego napięcia, gdy częstotliwość zmienia się, aby uzyskać określony moment obrotowy. Na przykład, jeśli silnik jest zaprojektowany do pracy pod napięciem 440 V przy 50 Hz, to prąd przemienny przyłożony do silnika musi zostać zmniejszony do połowy (220 woltów), gdy częstotliwość zmieni się o połowę (25 Hz). Ta regulacja oparta jest na woltach / Hz. W powyższym przypadku stosunek wynosi 440/50 = 8,8 V / Hz.
 Inne metody kontroli napięcia:
Inne metody kontroli napięcia:
 Inne metody kontroli napięcia:
Inne metody kontroli napięcia:Oprócz sterowania napięciem / Hz, bardziej zaawansowane metody, takie jak bezpośrednia kontrola momentu obrotowego lub DTC, Modulacja szerokości impulsu wektora przestrzeni (SVPWM) itp. służą również do sterowania prędkością silnika. Kontrolując napięcie w silniku, można precyzyjnie kontrolować strumień magnetyczny i moment obrotowy. W metodzie PWM przełączniki inwertera wytwarzają falę quasi-sinusoidalną poprzez serię wąskich impulsów z pseudosinusoidalnymi zmiennymi czasami trwania impulsu.
Interfejs operacyjny:
Ta sekcja umożliwia użytkownikowi uruchamianie / zatrzymywanie silnika i regulację prędkości. Inne funkcje obejmują zmianę kierunku obrotów silnika, przełączanie między ręczną i automatyczną kontrolą prędkości, itp. Interfejs operacyjny składa się z panelu z wyświetlaczem lub wskaźnikami i miernikami pokazującymi prędkość silnika, przyłożone napięcie itp. Zestaw przełączników z klawiaturą jest zwykle dostarczany. do sterowania systemem.
Wbudowany-miękki start:
W zwykłym silniku indukcyjnym włączanym za pomocą przełącznika prądu przemiennego pobierany prąd jest znacznie większy od wartości znamionowej i może wzrastać wraz ze wzrostem przyspieszenia obciążenia, aby osiągnąć pełną prędkość silnika.
Z drugiej strony w silniku sterowanym VFD przykładane jest początkowo niskie napięcie przy niskiej częstotliwości. Ta częstotliwość i napięcie rosną z kontrolowaną szybkością, aby przyspieszyć obciążenie. Powoduje to wytwarzanie prawie większego momentu obrotowego niż wartość znamionowa silnika.
Komutacja silnika VFD :
Częstotliwość i przyłożone napięcie są najpierw redukowane do kontrolowanego poziomu, a następnie zmniejszane aż do zera i wyłączania silnika.
Obwód aplikacji do sterowania prędkością jednofazowego silnika indukcyjnego
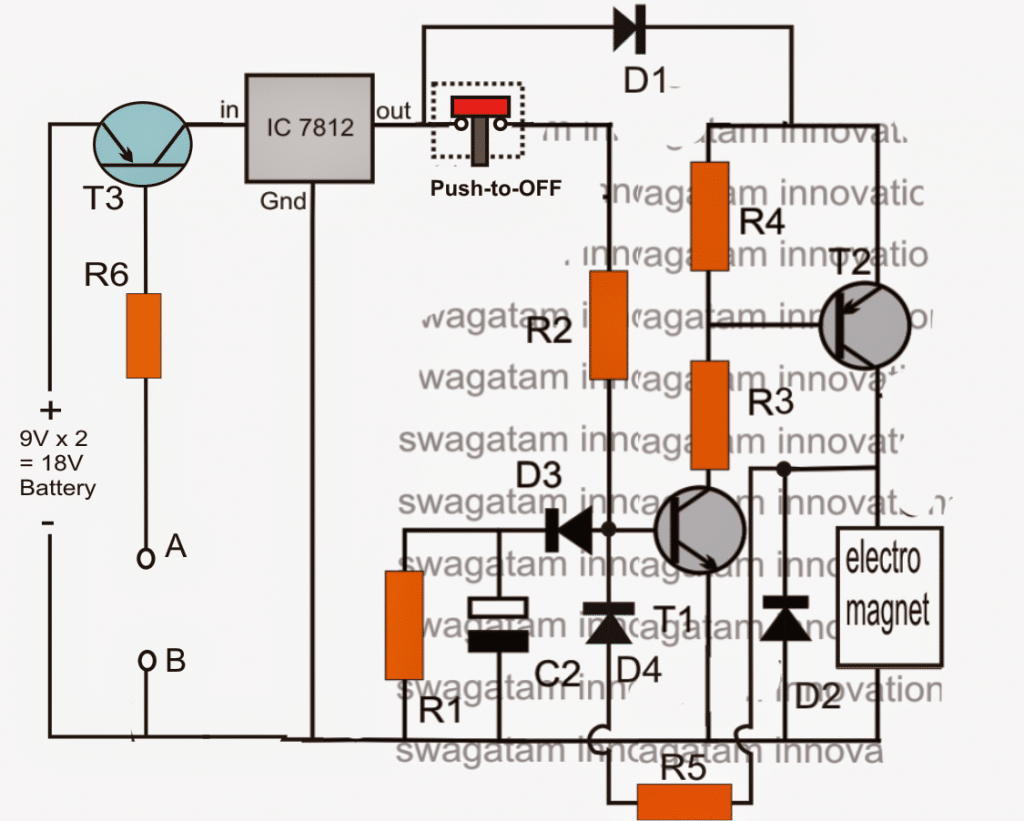
Podejście to jest stosunkowo łatwe, jeśli chodzi o obwód mocy i obwód sterowania. Po stronie wejściowej zastosowano podwajacze napięcia, a po stronie wyjściowej mostek H lub falownik 2-fazowy, jak pokazano na rysunku 2. Jeden koniec uzwojenia głównego i początkowego jest podłączony do każdego półmostka, a pozostałe końce są podłączone do punktu zerowego zasilacza AC.
Obwód sterujący wymaga czterech PWM z dwiema uzupełniającymi się parami z wystarczającą strefą nieczułości między dodatkowymi wyjściami. Martwe pasma PWM to PWM0-PWM1 i PWM2-PWM3. PIC16F72 nie ma PWM zaprojektowanych w sprzęcie do wysyłania tak, jak potrzebujemy. Jeśli chodzi o VF, szyna prądu stałego jest syntetyzowana przez zmianę częstotliwości i amplitudy. To da dwa napięcia sinusoidalne poza fazą.
Jeżeli napięcie przyłożone do uzwojenia głównego opóźnia uzwojenie początkowe o 90 stopni, silnik pracuje w jednym (tj. Do przodu) kierunku. Jeżeli chcemy zmienić kierunek obrotów to napięcie przyłożone do uzwojenia głównego ma przewodzić uzwojenie początkowe.
Mam nadzieję, że masz pomysł na temat przemiennika częstotliwości do silnika indukcyjnego z powyższego artykułu. więc jeśli masz jakieś pytania dotyczące tej koncepcji lub elektrycznej i projekt elektroniczny proszę zostawić sekcję komentarzy poniżej.