W nowoczesnym świecie, robot będzie odgrywał ważną rolę . Głównym celem robota jest zmniejszenie siły roboczej. Roboty są wykorzystywane w elektronice w wielu zastosowaniach. W tym artykule omówiliśmy, jak zbudować robota z modułem Arduino i mikrokontrolerem 8051. Aby zbudować robota z Arduino, wyjaśniamy robota arduino z unikaniem przeszkód. Wymagane komponenty obejmują korpus robota, silnik prądu stałego, czujnik ultradźwiękowy, moduł Arduino, układ scalony sterownika silnika i moduł Arduino
Jak zbudować robota?
Plik wymagane komponenty budowa robota obejmuje następujące elementy
Ciało robota
Podstawowy korpus robota robot omijania przeszkód pokazano na poniższym obrazku. Korpus robota jest korpusem z tworzywa sztucznego i zawiera koła po obu stronach. Przed korpusem robota umieszczony jest czujnik ultradźwiękowy. Za pomocą czujnika ultradźwiękowego można wykryć przeszkodę. Gdy robot się porusza, jeśli czujnik ultradźwiękowy wykryje jakąkolwiek przeszkodę, robot odsunie się na bok i będzie kontynuował ruch.

Ciało robota
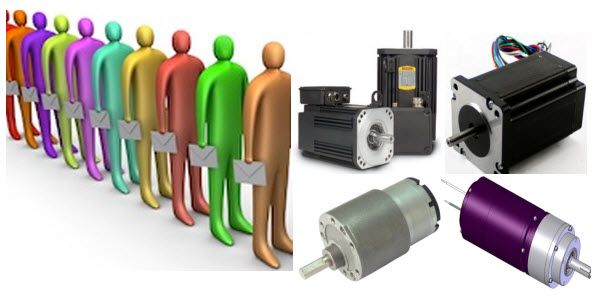
Silnik prądu stałego
Plik Silnik prądu stałego to silnik elektryczny i działa na prąd stały. Działanie dowolnego silnika elektrycznego opiera się na elektromagnetyzmie. Pole magnetyczne jest wytwarzane przez przewodnik przewodzący prąd, gdy jest on umieszczony w zewnętrznym polu magnetycznym, będzie działał proporcjonalnie do prądu w przewodniku. Ogólnie wiemy, że magnesy przyciągają przeciwną biegunowość z północy na południe i jeśli bieguny są takie same jak północ na północ i południe na południe, wtedy magnesy będą odpychać.

Silnik prądu stałego
Wewnętrzna konfiguracja silnika prądu stałego jest zaprojektowana tak, aby połączyć oddziaływanie magnetyczne między przewodnikiem przewodzącym prąd a zewnętrznym polem magnetycznym w celu wytworzenia ruchu. W tym przypadku używamy dwóch silników prądu stałego, każdy silnik zawiera 6 V, a łącznie dwa silniki prądu stałego zawierają 12 V. W korpusie robota umieszczone są dwa silniki prądu stałego, co widać na poniższym obrazku. Korpus robota porusza się za pomocą silników prądu stałego

Korpus robota z silnikiem prądu stałego
Moduł Arduino
Poniższy obraz przedstawia obraz modułu arduino. Plik moduł arduino odgrywa ważną rolę w projektowaniu robota omijającego przeszkody z wykorzystaniem zestawu arduino. Pin odbiornika arduino jest połączony z drugim pinem czujnika ultradźwiękowego, a pin 1, 2 i 3 modułu arduino jest podłączony do sterownika silnika prądu stałego. Wspólne komponenty kondensator i dioda są również podłączone do modułu arduino za pomocą zasilania bateryjnego.

Moduł Arduino
Układ scalony sterownika silnika
Aby uruchomić silnik prądu stałego sterownik silnika IC używany. Piny 3, 6 i 11, 14 sterownika silnika są podłączone do silnika prądu stałego. Piny wejściowe 1 i 2 są podłączone do modułu arduino, a pin włączający jest połączony z pinem nadajnika arduino. Piny 4, 5, 12, 13 sterownika silnika są połączone z masą.

Układ scalony sterownika silnika
Czujnik ultradźwiękowy
W tej koncepcji czujnik ultradźwiękowy Służy do wykrywania przeszkody przed Tobą i wysyła polecenie do tablicy arduino. W zależności od sygnału wejściowego mikrokontroler przekierowuje robota do ruchu w naprzemiennych kierunkach.

Czujnik ultradźwiękowy
Zastosowania robota arduino do omijania przeszkód
- Robot arduino może poruszać się po dowolnej powierzchni
- Może poruszać się po metalowej powierzchni, takiej jak korpus lodówki.
Poniższy obrazek przedstawia robota arduino do omijania przeszkód

Robot Arduino do unikania przeszkód
Aby zbudować robota z mikrokontroler 8051 wyjaśniamy o pojeździe robota z wykrywaczem metali. Komponenty wymagane do zbudowania robota z mikrokontrolerem 8051 to
- Mikrokontroler 8051
- Silniki prądu stałego
- Sterowniki silników
- Wykrywacz metali
- Dekoder
- Encoder
- Wciskać przyciski
- Kryształ
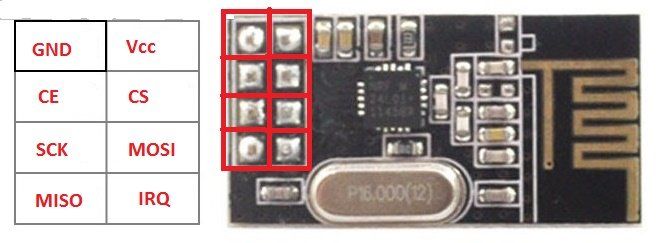
- Nadajnik i odbiornik RF
Wykrywacz metali
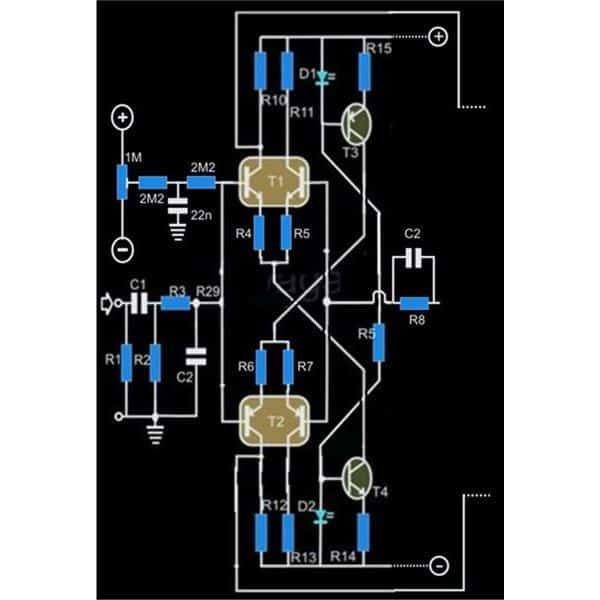
Plik wykrywacz metali to cewka, która ma jedną lub więcej metalowych cewek używanych do wykrywania metali na ziemi. Wykrywacz metali działa na zasadzie indukcji elektromagnetycznej. Detektor metalu jest połączony z korpusem robota poprzez PCB, co widać na ostatnim zdjęciu. Poniższy obraz przedstawia ogólny wykrywacz metali używany w projektach elektronicznych.

Wykrywacz metali
Wciskać przyciski
Przyciski to przyciski wykonane z twardych metali, takich jak plastik i metal. Generalnie przyciski służą do resetowania programu w mikrokontrolerze. Poniższy rysunek przedstawia obraz przycisku.

Naciśnij przycisk
8051 Mikrokontroler
Plik Mikrokontroler 8051 składa się z 40 pinów . Czwarty i piąty pin mikrokontrolera jest podłączony do oscylatora kwarcowego. Pin Vcc jest podawany do zasilania 5V, a pin uziemienia jest podłączony do masy. Piny 15, 16, 18, 19 mikrokontrolera są podłączone do układu scalonego enkodera HT12E. Piny mikrokontrolera 2, 7, 8, 9 są połączone z przyciskami.
Poniższy obraz po podłączeniu wszystkich komponentów, takich jak rezystor, kondensator, oscylator kwarcowy, mikrokontroler serii 8051, enkodery itp. Są włączone płytka drukowana .

Połączenia PCB
Poniższy rysunek przedstawia robota wykrywającego metal z mikrokontrolerem serii 8051.

Robot wykrywający metal z mikrokontrolerem serii 8051
W tym artykule omówiliśmy Jak zbudować robota z mikrokontrolerem Arduino i 8051 . Mam nadzieję, że czytając ten artykuł, zdobyłeś podstawową wiedzę na temat budowy robota. Jeśli masz jakieś pytania dotyczące tego artykułu lub elektroniki i projekty komunikacyjne , prosimy o komentarz w poniższej sekcji. Oto pytanie do Ciebie, Co to jest mikrokontroler z serii 8051?
.