
Wprowadzenie:
W dzisiejszych czasach wiele gałęzi przemysłu używa robotów ze względu na ich wysoki poziom wydajności i niezawodności, co jest wielką pomocą dla ludzi. Robotyka unikania przeszkód służy do wykrywania przeszkód i unikania kolizji. To jest robot autonomiczny. Konstrukcja robota omijającego przeszkody wymaga integracji wielu czujników zgodnie z ich zadaniem.
Wykrywanie przeszkód jest podstawowym wymaganiem tego autonomicznego robota. Robot pobiera informacje z otoczenia poprzez zamontowane na nim czujniki. Niektóre czujniki używane do wykrywania przeszkód, takie jak czujniki uderzeniowe, czujniki na podczerwień, czujniki ultradźwiękowe, itp. Czujnik ultradźwiękowy jest najbardziej odpowiedni do wykrywania przeszkód i jest tani i ma duży zasięg.

Automatyczny pojazd do omijania przeszkód
Zasada działania:
Unikanie przeszkód pojazd robotyczny wykorzystuje czujniki ultradźwiękowe do swoich ruchów. Do osiągnięcia żądanej operacji używany jest mikrokontroler z rodzin 8051. Silniki są połączone poprzez układ scalony sterownika silnika z mikrokontrolerem. Czujnik ultradźwiękowy jest zamocowany z przodu robota.
Zawsze, gdy robot porusza się po żądanej ścieżce, czujnik ultradźwiękowy w sposób ciągły przesyła fale ultradźwiękowe z głowicy czujnika. Za każdym razem, gdy pojawia się przed nią przeszkoda, fale ultradźwiękowe odbijają się od obiektu, a informacja jest przekazywana do mikrokontrolera. Mikrokontroler steruje silnikami lewy, prawy, tylny, przedni na podstawie sygnałów ultradźwiękowych. Do sterowania prędkością każdego silnika służy modulacja szerokości impulsu (PWM).

Schemat blokowy Unikanie przeszkód Zautomatyzowany pojazd
Różne czujniki używane do omijania przeszkód Pojazd robotyczny
1. Wykrywanie przeszkód (czujnik podczerwieni):
Czujniki podczerwieni służą do wykrywania przeszkód, a sygnał wyjściowy z czujnika przesyła do mikrokontrolera. Mikrokontroler steruje pojazdem (do przodu / do tyłu / stop) za pomocą silnika prądu stałego, który jest umieszczony w pojeździe. Jeśli jakakolwiek przeszkoda umieszczona w linii, czujnik podczerwieni nie odbiera promieni świetlnych i przekazuje sygnały do mikrokontrolera. Mikrokontroler natychmiast zatrzyma pojazd i włączy się syrena. Po minucie robot sprawdzi stan ścieżki, jeśli przeszkoda zostanie usunięta, robot przesunie się daleko, w przeciwnym razie robot powróci do miejsca startu. Czujnik wykrywa obiekty, emitując krótki impuls ultradźwiękowy, a następnie nasłuchując eco. Pod kontrolą mikrokontrolera hosta czujnik emituje krótką eksplozję 40 kHz. Ta eksplozja zapuszcza się lub przemieszcza w powietrzu, uderza w przedmiot, a następnie ponownie odbija się od czujnika. Czujnik dostarcza impuls wyjściowy do hosta, który kończy się po wykryciu echa, stąd szerokość jednego impulsu do następnego jest brana do obliczeń przez program w celu uzyskania wyników w odległości od obiektu.
dwa. Wykrywanie ścieżki (czujnik zbliżeniowy):
Normalna przyczyna powoduje, że oba czujniki podają wytyczne i robot podąża za nim idąc prosto po ścieżce. Kiedy linia kończy się w tym czasie, robot cofa się o 180 i zawraca w to samo miejsce.

Bycie on-line
Czujniki zbliżeniowe służą do wykrywania ścieżki. Gdy prawy czujnik nie zostanie wykryty na krzywej, mikrokontroler aktywuje lewy silnik tak, aby obracał się w lewo, aż do uzyskania sygnału z prawego czujnika. Po wykryciu sygnału z prawego czujnika oba silniki są uruchamiane, aby jechać do przodu. Kiedy linia kończy się w tym czasie, robot cofa się o 180 i zawraca w to samo miejsce.

Utrata linii
3. Czujnik ultradźwiękowy:
Czujnik ultradźwiękowy służy do wykrywania przeszkód. Czujnik ultradźwiękowy przesyła fale ultradźwiękowe z głowicy czujnika i ponownie odbiera fale ultradźwiękowe odbite od obiektu.
Istnieje wiele zastosowań wykorzystujących czujniki ultradźwiękowe, takie jak systemy alarmowe, automatyczne otwieracze drzwi itp. Czujnik ultradźwiękowy jest bardzo kompaktowy i ma bardzo wysoką wydajność.

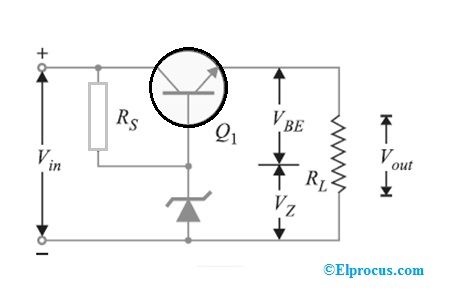
Schemat ogólny czujnika ultradźwiękowego
Zasada działania:
Czujnik ultradźwiękowy emituje sygnał o krótkiej i wysokiej częstotliwości. Te rozchodzą się w powietrzu z prędkością dźwięku. Jeśli uderzą w jakiś przedmiot, odbijają sygnał echa do czujnika. Czujnik ultradźwiękowy składa się z multiwibratora przymocowanego do podstawy. Multiwibrator to połączenie rezonatora i wibratora. Rezonator generuje falę ultradźwiękową generowaną przez wibracje. Czujnik ultradźwiękowy składa się z dwóch części emitera, który wytwarza falę dźwiękową 40 kHz, a detektor wykrywa falę dźwiękową 40 kHz i wysyła sygnał elektryczny z powrotem do mikrokontrolera.

Zasada działania ultradźwięków
Czujnik ultradźwiękowy pozwala robotowi wirtualnie zobaczyć i rozpoznać obiekt, omijać przeszkody, mierzyć odległość. Zasięg działania czujnika ultradźwiękowego wynosi od 10 cm do 30 cm.
Działanie czujnika ultradźwiękowego:
Kiedy do przetwornika ultradźwiękowego przyłożony jest impuls elektryczny o wysokim napięciu, wibruje on w określonym spektrum częstotliwości i generuje wybuch fal dźwiękowych. Zawsze, gdy przed czujnikiem ultradźwiękowym pojawi się jakakolwiek przeszkoda, fale dźwiękowe odbijają się w postaci echa i generują impuls elektryczny. Oblicza czas między wysłaniem fal dźwiękowych a odebraniem echa. Wzorce echa zostaną porównane z wzorami fal dźwiękowych, aby określić stan wykrytego sygnału.
Uwaga: Odbiornik ultradźwięków powinien wykrywać sygnał z nadajnika ultradźwiękowego, gdy fale nadawcze uderzają o obiekt. Połączenie tych dwóch czujników pozwoli robotowi wykryć obiekt na swojej drodze. Czujnik ultradźwiękowy jest przymocowany przed robotem, który pomoże robotowi poruszać się po hali dowolnego budynku.
Zastosowania czujnika ultradźwiękowego:
- Automatyczne przełączanie sygnalizacji świetlnej
- System alarmowy
- Liczniki dostępu przełączniki parkometry
- Tylny sonar samochodów
Cechy czujnika ultradźwiękowego:
- Kompaktowy i lekki
- Wysoka czułość i wysokie ciśnienie
- Wysoka niezawodność
- Pobór mocy 20 mA
- Komunikacja impulsowa
- Wąski kąt akceptacji
- Zapewnia dokładne, bezkontaktowe oszacowanie separacji w zakresie od 2 cm do 3 m
- Dioda LED punktu wybuchu pokazuje szacunkowe postępy
- 3-stykowe złącze ułatwia podłączenie za pomocą łącza programistycznego serwomechanizmu
Zastosowania robota do unikania przeszkód:
- Szczególnie zastosowania wojskowe
- Może być używany do wojen miejskich
Teraz jasno zrozumiałem koncepcję pojazdu zrobotyzowanego wykorzystującego ultradźwiękowy czujnik wykrywania przeszkód, jeśli dalsze pytania na ten temat lub koncepcja projektów elektrycznych i elektronicznych zostawią komentarze poniżej.
Kredyt zdjęciowy:
- Schemat ogólny czujnika ultradźwiękowego wg Letsmakerobots
- Zasada działania czujnika ultradźwiękowego wg Microsonic






{kind=link}