W poście szczegółowo opisano różne metody konfigurowania obwodu korekcji współczynnika mocy lub obwodu PFC w projektach SMPS i wyjaśniono opcje najlepszych praktyk dla tych topologii, tak aby były one zgodne z nowoczesnymi wytycznymi dotyczącymi ograniczeń PFC.
Projektowanie wydajnych obwodów zasilających nigdy nie było łatwe, jednak z biegiem czasu naukowcom udało się rozwiązać większość problemów, i w ten sam sposób optymalizowane są również nowoczesne projekty SMPS z najlepszymi możliwymi wynikami, dzięki pojawiające się normy regulacyjne, które odegrały istotną rolę we wprowadzaniu zaostrzonych parametrów jakościowych dla nowoczesnych zasilaczy.
Wytyczne PFC
Współczesne ograniczenia jakości zasilania są ustanawiane dość agresywnie, wspólnie dzięki wysiłkom producentów, dostawców i innych zainteresowanych organów zarządzających.
Spośród wielu parametrów jakościowych przewidzianych dla nowoczesnych konstrukcji zasilaczy, korekcja współczynnika mocy (PFC), która faktycznie ma postać eliminacji harmonicznych, została uznana za wymóg obowiązkowy przez przepisy IEC 61000-3-2.
Z tego powodu projektanci są zmuszeni stawić czoła trudniejszym wyzwaniom przy projektowaniu stopni korekcji współczynnika mocy w projektach zasilaczy, aby spełnić te rygorystyczne, współczesne przepisy, a zasilacze stają się coraz bardziej potężne dzięki specyfikacjom i zakresowi zastosowań, tworząc odpowiednie obwody PFC. nie staje się łatwiejsze dla wielu producentów na arenie.
Prezentowane tutoriale są specjalnie przeznaczone dla wszystkich stowarzyszeń i profesjonalistów, którzy zajmują się produkcją lub projektowanie flyback SMPS za ułatwienie im najbardziej idealnych projektów i obliczeń PFC zgodnie z ich indywidualnymi wymaganiami.
Dyskusje zawarte w tych samouczkach pomogą Ci zaprojektować obwody PFC nawet dla znacznie dużych jednostek w zakresie do 400 watów, 0,75 ampera.
Czytelnicy otrzymają również możliwość zapoznania się z wyborem jednostopniowych przetworników izolowanych, które zawierają również sterowniki LED. Samouczek projektowania krok po kroku i instrukcje wraz z porównaniami na poziomie systemu, wielu projektantów aktywnie zaangażowanych w dziedzinę energoelektroniki zostanie oświeconych. zastosować najbardziej optymalne podejście do ich konkretnych potrzeb aplikacji
Cel korekcji współczynnika mocy
Optymalizacja obwodu korekcji współczynnika mocy w nowoczesnych jednostkach SMPS (zasilacz impulsowy) może ewoluować w niedawnej przeszłości ze względu na pojawienie się wielu zaawansowanych odpowiednich układów scalonych (IC), które umożliwiły opracowanie różnych konstrukcji PFC o specyficznych tryby pracy i możliwość obsługi indywidualnych wyzwań.
Wraz ze wzrostem zakresu topologii SMPS, złożoność projektowania i wdrażania PFC również się pogorszyła w obecnych czasach.
W pierwszym samouczku poznamy szczegóły operacyjne projektu, który jest preferowany przez wszystkich profesjonalistów do poprawek.
Zasadniczo, korekcja współczynnika mocy pomaga zoptymalizować prąd wejściowy w zasilaczach off-line, tak aby były w stanie zwiększyć rzeczywistą moc z dostępnego wejścia sieciowego.
Zgodnie z normalnym wymaganiem dane urządzenie elektryczne musi emulować się jako obciążenie o czystej rezystywności, tak aby miało zerowy pobór mocy biernej.
Warunek ten powoduje generowanie prawie zerowych harmonicznych prądów wejściowych, innymi słowy pozwala na to, aby pobierany prąd był idealnie zgodny z fazą wejściowego napięcia zasilania, które normalnie ma postać fali sinusoidalnej.
To osiągnięcie umożliwia urządzeniu pobór „mocy rzeczywistej” z sieci na najbardziej optymalnym i wydajnym poziomie, co z kolei skutkuje minimalizacją strat energii elektrycznej i zwiększeniem jej sprawności.
To efektywne wykorzystanie energii elektrycznej nie tylko pomaga urządzeniu prezentować się w najbardziej efektywny sposób, ale także dla przedsiębiorstw użyteczności publicznej i zaangażowanego wyposażenia kapitałowego do procesu.
Powyższa cecha ponadto umożliwia uwolnienie linii elektroenergetycznych od harmonicznych i wynikających z nich zakłóceń w urządzeniach w sieci.
Oprócz wyżej wymienionych zalet, włączenie PFC w nowoczesnych zasilaczach służy również spełnieniu wymagań regulacyjnych określonych w Europie i Japonii zgodnie z normą IEC61000-3-2, do której powinny kwalifikować się wszystkie urządzenia elektryczne.
Powyższy warunek został uregulowany dla większości urządzeń elektronicznych, których moc znamionowa może wynosić powyżej 75 watów zgodnie ze standardami urządzeń klasy D lub które są nawet wyższe, określając najwyższą amplitudę harmonicznych częstotliwości linii w zakresie do 39 harmonicznej.
Oprócz tych standardów, PFC jest również stosowany w celu zapewnienia innych sprawności, takich jak Energy Star 5.0 istotne dla komputerów i Energy Star 2.0 dla systemów zasilaczy i telewizorów od 2008 roku.
Definicja współczynnika mocy
Korekcja współczynnika mocy lub współczynnika mocy może być zdefiniowana jako stosunek mocy czynnej do mocy pozornej i wyrażona jako:
PF = Moc rzeczywista / Moc pozorna, gdzie moc rzeczywista jest wyrażona w
Waty, podczas gdy moc pozorna jest wyrażana w VA.
W tym wyrażeniu moc rzeczywistą jest określana jako średnia iloczynu chwilowego prądu i napięcia w fazie lub cyklu, podczas gdy moc pozorna jest traktowana jako wartość skuteczna prądu pomnożona przez napięcie.
Sugeruje to, że ilekroć odpowiedniki prądu i napięcia są sinusoidalne i zgodne ze sobą w fazie, wypadkowy współczynnik mocy wynosi 1,0.
Jednak w stanie, w którym parametry prądu i napięcia są sinusoidalne, ale nie w fazie, powoduje powstanie współczynnika mocy będącego cosinusem kąta fazowego.
Opisane powyżej warunki współczynnika mocy mają zastosowanie w przypadkach, gdy zarówno napięcie, jak i prąd są czystymi falami sinusoidalnymi, w połączeniu z sytuacją, w której towarzyszące obciążenie składa się z elementów rezystancyjnych, indukcyjnych i pojemnościowych, które mogą mieć charakter nieliniowy, że nie dostosowuje się do parametrów prądu wejściowego i napięcia.
Topologie SMPS zwykle wprowadzają nieliniową impedancję do linii zasilającej ze względu na wyjaśniony powyżej charakter jej obwodów.
Jak działa SMPS
Obwód SMPS zasadniczo zawiera stopień prostownika na wejściu, który może być prostownikiem półfalowym lub pełnookresowym oraz uzupełniający kondensator filtrujący do utrzymywania wyprostowanego napięcia na nim do poziomu szczytowego wejściowej fali sinusoidalnej do czasu następnego szczytu Pojawia się fala sinusoidalna i powtarza cykl ładowania tego kondensatora, powodując wymagane szczytowe stałe napięcie na nim.
Ten proces ładowania kondensatora w każdym cyklu szczytowym prądu przemiennego wymaga, aby wejście było wyposażone w prąd wystarczający do zaspokojenia poboru obciążenia przez zasilacz impulsowy, pomiędzy tymi przedziałami szczytowymi.
Cykl jest realizowany przez szybkie zrzucenie dużego prądu do kondensatora, który jest doprowadzany do obciążenia poprzez rozładowanie, aż do nadejścia następnego cyklu szczytowego.
W przypadku tego nierównomiernego przebiegu ładowania i rozładowania zaleca się, aby prąd impulsu z kondensatora był o 15% wyższy niż średni wymóg obciążenia.

Na powyższym rysunku widać, że pomimo znacznej ilości odkształceń napięcie i parametry prądu są pozornie w fazie ze sobą.
Jeśli jednak zastosujemy termin „cosinus kąta fazowego” do powyższego, doprowadziłoby to do nieprawidłowego wniosku, że zasilacz ma współczynnik mocy równy 1,0
Przebiegi górny i dolny wskazują ilość harmonicznych prądu.
Tutaj wskazana jest „podstawowa zawartość harmonicznej” w porównaniu z amplitudą 100%, podczas gdy wyższe harmoniczne są przedstawiane jako uzupełniające wartości procentowe podstawowej amplitudy.
Jednakże, ponieważ rzeczywista moc jest określana tylko przez składową podstawową, podczas gdy inne uzupełniające harmoniczne reprezentują tylko moc pozorną, rzeczywisty współczynnik mocy może być znacznie poniżej 1,0.
Odchylenie to nazywamy pojęciem współczynnika zniekształcenia, który jest zasadniczo odpowiedzialny za powodowanie niejednostkowego współczynnika mocy w jednostkach SMPS.
Wyrażenie władzy rzeczywistej i pozornej
Ogólne wyrażenie odnoszące się do związku między mocą rzeczywistą i pozorną można podać w następujący sposób:

Gdzie cosΦ tworzy współczynnik przesunięcia wyłaniający się z kąta fazowego Φ między przebiegami prądu / napięcia, a cosΦ oznacza współczynnik zniekształcenia.

Nawiązując do poniższego diagramu, możemy być świadkami sytuacji, która wykazuje doskonałą korekcję współczynnika mocy.

Widzimy, że tutaj przebieg prądu całkiem idealnie odwzorowuje przebieg napięcia, ponieważ oba najwyraźniej działają w fazie i są ze sobą zsynchronizowane.
Dlatego można założyć, że harmoniczne prądu wejściowego są prawie zerowe.
Korekcja współczynnika mocy a redukcja harmonicznych
Patrząc na wcześniejsze ilustracje, jest oczywiste, że współczynnik mocy i niskie harmoniczne działają w synchronizacji.
Ogólnie uważa się, że nakreślenie granic odpowiednich harmonicznych może pomóc w ograniczeniu zanieczyszczenia prądu wejściowego w liniach elektroenergetycznych poprzez eliminację zakłóceń prądu zakłócającego z innymi urządzeniami w pobliżu.
Dlatego, podczas gdy przetwarzanie prądu wejściowego może być określane jako „korekcja współczynnika mocy”, to wyjściowa wielkość udokładnienia, według której przetwarzanie to jest rozumiane jako zawartość harmonicznych zgodnie z międzynarodowymi wytycznymi.
W przypadku topologii SMPS jest to zwykle element przemieszczający, który jest w przybliżeniu równy jedności, co prowadzi do następujących zależności między współczynnikiem mocy a zniekształceniami harmonicznymi.

W wyrażeniu THD reprezentuje całkowite zniekształcenie harmoniczne jako kwadratową sumę szkodliwych harmonicznych ponad składową podstawową, wyrażającą względną wagę powiązanej zawartości harmonicznej w odniesieniu do podstawowego odpowiednika. Inne równanie wiąże wartość bezwzględną THD i nie w proporcji%, wyrażając, że THD musi być zasadniczo równe zeru, aby stworzyć jedność PF.
Rodzaje korekcji współczynnika mocy
Charakterystyka przebiegu wejściowego na powyższym rysunku przedstawia typowy „aktywny” rodzaj korekcji współczynnika mocy dla urządzenia SMPS wprowadzonego pomiędzy konfiguracją prostownika wejściowego a kondensatorem filtrującym oraz poprzez układ scalony PFC sterujący przebiegiem wraz z powiązanymi obwodami dla zapewnienie, że prąd wejściowy spójnie podąża za kształtem napięcia wejściowego.
Ten rodzaj przetwarzania można uznać za najbardziej rozpowszechniony rodzaj PFC stosowany we współczesnych obwodach SMPS, co można zobaczyć na poniższym rysunku.
Powiedziawszy to, w żadnym wypadku nie jest obowiązkowe, aby tylko „aktywne” wersje wykorzystujące układy scalone i półprzewodniki były używane w proponowanym PFC, oraz inna forma projektu, która może zagwarantować rozsądną wielkość PFC poniżej ustalonych przepisów, jest zwykle mile widziana.
Zauważono, że w rzeczywistości pojedyncza cewka zastępująca pozycję „aktywnego” odpowiednika jest w stanie całkiem zadowalająco odrzucać harmoniczne, kontrolując wartości szczytowe i dość wydajnie rozprowadzając prąd równomiernie zsynchronizowany z napięciem wejściowym.
Pasywny projekt PFC
Jednak ta forma pasywnego sterowania PFC może wymagać znacznej objętości cewki indukcyjnej z rdzeniem żelaznym i dlatego może być stosowana w zastosowaniach, w których zwartość nie jest kluczowym wymaganiem. (strona 12)
Pojedyncza bierna cewka indukcyjna może wydawać się szybkim rozwiązaniem w przypadku PFC, ale w przypadku zastosowań o dużej mocy rozmiar może stać się nieinteresujący ze względu na niepraktycznie duże wymiary.
Na poniższym wykresie możemy zobaczyć charakterystykę wejściową trzech liczb 250-watowych wariantów PC SMPS, z których każdy reprezentuje przebieg prądu przy równoważnym współczynniku skali.
Łatwo widać, że wynik uzyskany z PFC opartego na biernej cewce jest o 33% większy niż w przypadku odpowiednika z aktywnym filtrem PFC.
Chociaż może to być w stanie spełnić normy IEC61000-3-2, z pewnością nie będzie równorzędne z ostatnią, bardziej rygorystyczną regułą wymagań 0.9PF i nie spełni poziomu akceptacji QC, ustalonego zgodnie z nowymi standardami.
Podstawowy schemat blokowy

Ze względu na trwający trend na rynku elektronicznym, w którym koszty miedzi rosną wraz ze wzrostem procesu wytwarzania rdzeni magnetycznych i wprowadzaniem nowoczesnych, znacznie tańszych materiałów półprzewodnikowych, nie będzie zaskoczeniem, jeśli zauważymy podejście aktywnego PFC. zyskuje ogromną popularność niż jej pasywny odpowiednik.
Można zauważyć, że w nadchodzącej przyszłości ten trend jeszcze się wzmocni, przedstawiając coraz bardziej zaawansowane i ulepszone rozwiązania PFC dla wielu projektantów i producentów SMPS.

Porównanie harmonicznych linii wejściowej z normami IEC610003-2
Na poniższym rysunku możemy zobaczyć ślady trzech oddzielnych 250-watowych wyników SMPS PC w odniesieniu do ograniczeń IEC6000-3-2. Wskazane ograniczenie dotyczy wszystkich gadżetów klasy D, takich jak komputery PC, telewizory i ich monitory.
Pokazane limity zawartości harmonicznych są ustalane zgodnie z mocą wejściową urządzeń. W przypadku produktów związanych z oświetleniem, takich jak światła LED, świetlówki kompaktowe, zwykle przestrzegane są ograniczenia klasy C, które są identyczne z ich limitami mocy wejściowej.
Inne niekonwencjonalne produkty elektroniczne ustalają limit PFC proporcjonalnie do minimalnej mocy wejściowej 600 W.
Jeśli spojrzymy na pasywny ślad PFC, stwierdzimy, że nie jest on zgodny z ustawionym limitem ograniczenia, wystarczy dotknąć i odejść (przy harmonicznej nr 3)

Analiza pasywnych funkcji PFC
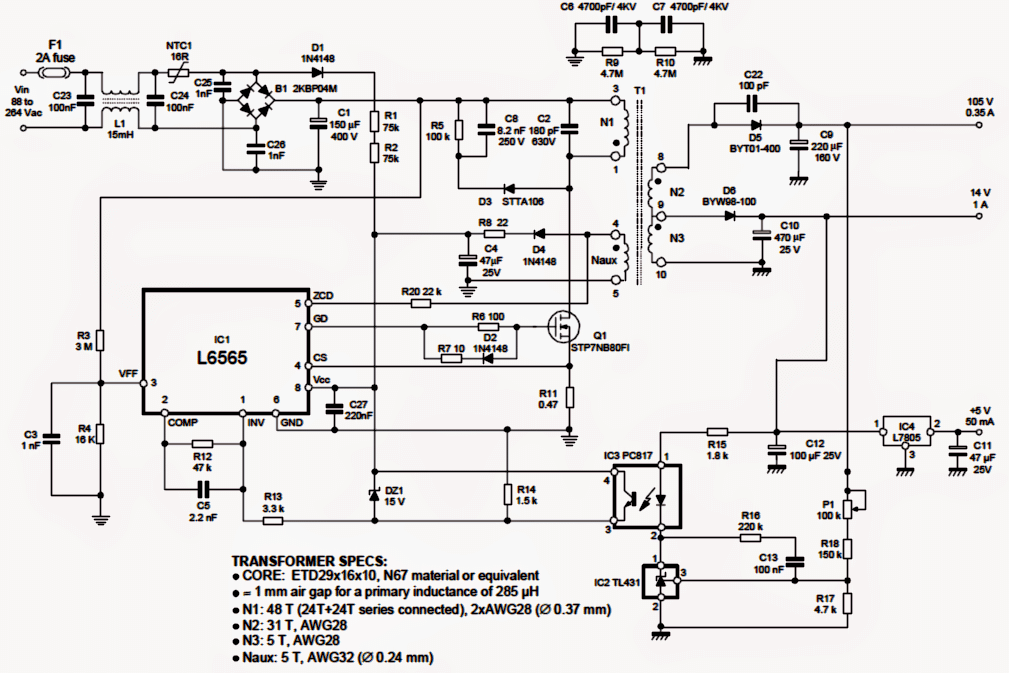
Na poniższym rysunku możemy zobaczyć klasyczny przykład pasywnego obwodu PFC zaprojektowanego dla tradycyjnego zasilacza PC. Godne uwagi jest tutaj połączenie środkowego zaczepu cewki indukcyjnej PFC z napięciem wejściowym linii wejściowej.
W trybie wyboru 220V (przełącznik otwarty), całe dwie sekcje cewki są podłączone, a sieć prostownika działa jak obwód prostownika z pełnym mostkiem.
Jednak w trybie 110 V (zamknięcie przełącznika) tylko 50% lub połowa cewki jest wykorzystywana przez lewą boczną sekcję cewki, podczas gdy sekcja prostownika jest teraz przekształcana w obwód podwójnego prostownika półfalowego.
Ponieważ wybór 220 V jest zobowiązany do generowania około 330 V po wyprostowaniu pełnej fali, stanowi to wejście magistrali dla SMPS i stwarza możliwość znacznych wahań w zależności od napięcia wejściowego linii.
Przykładowy schemat obwodu

Chociaż ten pasywny projekt PFC może wyglądać dość prosto i imponująco pod względem wydajności, może wykazywać kilka zauważalnych wad.
Oprócz nieporęcznego charakteru PFC, dwie inne rzeczy, które wpływają na jego wydajność, to po pierwsze włączenie mechanicznego przełącznika, który sprawia, że system jest podatny na możliwy błąd ludzki podczas obsługi urządzenia, a także związane z tym problemy ze zużyciem.
Po drugie, brak stabilizacji napięcia sieciowego skutkuje względną nieefektywnością w zakresie opłacalności i dokładności konwersji mocy DC na DC związanej z wyjściem PFC.
Kontrolery trybu krytycznego przewodzenia (CrM)
Stopień kontrolera zwany krytycznym trybem przewodzenia, który jest również określany jako kontroler trybu przejściowego lub trybu przewodzenia granicznego (BCM), to konfiguracje obwodów, które można skutecznie znaleźć w zastosowaniach elektroniki oświetleniowej. Chociaż są bezproblemowe dzięki swojej użyteczności, te kontrolery są stosunkowo drogie.
Poniższy diagram 1-8 przedstawia zwykły projekt obwodu sterownika CrM.

Zwykle kontroler CrM PFC będzie zawierał powyższy rodzaj obwodów, który można zrozumieć za pomocą następujących punktów:
Wejście stopnia powielacza odniesienia odbiera odpowiednio zwymiarowany sygnał ze skojarzonego wyjścia wzmacniacza błędu mającego biegun niskiej częstotliwości.
Drugie wejście mnożnika można zobaczyć jako odniesione ze stabilizowanym napięciem stałym DC wyprowadzonym z prostowanego wejścia liniowego AC.
Zatem wynikowy sygnał wyjściowy z mnożnika jest iloczynem względnego prądu stałego z wyjścia wzmacniacza błędu i sygnału odniesienia w postaci pełnookresowych impulsów sinusoidalnych prądu przemiennego z wejścia prądu przemiennego.
To wyjście ze stopnia mnożnika można zobaczyć również w postaci pełnookresowych impulsów sinusoidalnych, ale odpowiednio przeskalowanych proporcjonalnie do zastosowanego sygnału błędu (współczynnika wzmocnienia) używanego jako odniesienie dla napięcia wejściowego.
Amplituda sygnału tego źródła jest odpowiednio dostosowywana, aby zaimplementować odpowiednią określoną moc średnią i zapewnić odpowiednio regulowane napięcie wyjściowe.
Stopień odpowiedzialny za przetwarzanie amplitudy prądu powoduje, że prąd płynie zgodnie z przebiegiem wyjściowym z mnożnika, jednak można oczekiwać, że amplituda sygnału prądu o częstotliwości linii (po wygładzeniu) będzie o połowę mniejsza od tej wartości odniesienia ze stopnia mnożnika .
Tutaj operacje wykonywane przez obwód kształtujący prąd można rozumieć następująco:

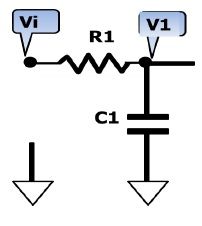
Odnosząc się do powyższego schematu, Vref oznacza sygnał wychodzący ze stopnia mnożnika, który jest następnie podawany do jednego z wzmacniaczy operacyjnych komparatora, którego drugie wejście jest powiązane z sygnałem o kształcie fali prądu.
Na wyłączniku zasilania prąd na cewce powoli rośnie, aż sygnał na boczniku osiągnie poziom Vref.
Zmusza to komparator do zmiany wyjścia z włączonego na wyłączony wyłączając zasilanie obwodu.
Gdy tylko to nastąpi, napięcie, które stopniowo narastało na cewce indukcyjnej, zaczyna powoli spadać do zera, a gdy dotknie zera, wyjście wzmacniacza operacyjnego powraca i włącza się ponownie, a cykl się powtarza.
Jak wskazuje nazwa powyższej cechy, wzorzec sterowania systemu nigdy nie pozwala, aby prąd cewki indukcyjnej wystrzelił powyżej określonej z góry granicy w ciągłych i nieciągłych trybach przełączania.
Taki układ pomaga przewidzieć i obliczyć związek między średnim poziomem prądu szczytowego wynikowego wyjścia z opampa. Ponieważ odpowiedź jest w postaci fal trójkątnych, średnia przebiegu oznacza dokładnie 50% rzeczywistych wartości szczytowych przebiegów trójkątnych.
Oznacza to, że wypadkowa średnia wartość sygnału prądowego fal trójkątnych byłaby = prąd cewki indukcyjnej x R sens lub po prostu wstawił połowę zadanego poziomu odniesienia (Vref) wzmacniacza operacyjnego.
Częstotliwość regulatorów wykorzystujących powyższą zasadę będzie zależna od napięcia sieciowego i prądu obciążenia. Częstotliwość może być znacznie wyższa przy wyższych napięciach linii i może się zmieniać wraz ze zmianami na wejściu liniowym.
Krytyczny tryb przewodzenia z dociskiem częstotliwości (FCCrM)
Pomimo swojej popularności w różnych aplikacjach sterowania PFC zasilaczy przemysłowych, wyżej wyjaśniony kontroler CrM ma pewne nieodłączne wady.
Główną wadą tego typu aktywnej regulacji PFC jest niestabilność częstotliwości w stosunku do stanu linii i obciążenia, co wskazuje na wzrost częstotliwości przy mniejszych obciążeniach i wyższych napięciach linii, a także przy każdorazowym zbliżaniu się fali sinusoidalnej do przejścia przez zero.
Jeśli podejmie się próbę rozwiązania tego problemu poprzez dodanie cęgów częstotliwości, na wyjściu pojawi się zniekształcony przebieg prądu, co wydaje się nieuniknione, ponieważ „Ton” pozostaje niedostosowany do tej procedury.

Jednak rozwój alternatywnej techniki pomaga osiągnąć rzeczywistą korekcję współczynnika mocy nawet w trybie nieciągłym (DCM). Zasadę działania można zbadać na poniższym rysunku i za pomocą dołączonych równań.

Odnosząc się do powyższego wykresu, prąd szczytowy cewki można oszacować rozwiązując:

Średni prąd cewki w odniesieniu do cyklu przełączania (który dodatkowo przyjmuje się jako chwilowy prąd linii dla danego cyklu przełączania, ze względu na fakt, że częstotliwość przełączania jest zwykle wyższa niż częstotliwość linii, na której występują zmiany napięcia sieciowego ) wyraża się wzorem:

Połączenie powyższej zależności i uproszczenie terminów daje:

Powyższe wyrażenie jasno wskazuje i implikuje, że w przypadku zaimplementowania metody, w której algorytm dba o utrzymanie ton.tcykl / Tsw na stałym poziomie, umożliwiłoby nam to uzyskanie prądu sinusoidalnego o współczynniku mocy równym jedności nawet w trybie nieciągłym. tryb pracy.
Chociaż powyższe rozważania ujawniają pewne wyraźne zalety proponowanej techniki kontrolera DCM, nie wydaje się, że jest to idealny wybór ze względu na związane z nią wysokie poziomy prądu szczytowego, jak pokazano w poniższej tabeli:

Aby osiągnąć idealne warunki PFC, rozsądnym podejściem byłoby zaimplementowanie warunku, w którym tryby działania DCM i Crm są łączone, aby wydoić to, co najlepsze z tych dwóch odpowiedników.
Dlatego, gdy warunki obciążenia nie są ciężkie, a CrM działa z wysoką częstotliwością, obwód przechodzi w tryb pracy DCM, aw przypadku, gdy prąd obciążenia jest wysoki, warunek Crm może się utrzymywać, tak że wartości szczytowe prądu nie mają tendencji do przekraczania niepożądanych wysokich granic.
Ten rodzaj optymalizacji w dwóch sugerowanych trybach sterowania można najlepiej zobrazować na poniższym rysunku, na którym połączono zalety dwóch trybów sterowania w celu uzyskania najbardziej pożądanych rozwiązań.

Kontynuuje tryb przewodzenia
Tryb ciągłego przewodzenia PFC może stać się dość popularny w projektach SMPS ze względu na ich elastyczną funkcję i zakres zastosowania oraz związanych z nimi kilka zalet.
W tym trybie bieżące naprężenie szczytowe jest utrzymywane na niższym poziomie, co powoduje zminimalizowane straty przełączania w odpowiednich składowych, a ponadto tętnienie wejściowe jest renderowane na minimalnym poziomie ze stosunkowo stałą częstotliwością, co z kolei umożliwia znacznie prostszy proces wygładzania. to samo.
Poniższe atrybuty związane z typem CCM PFC wymagają nieco dokładniejszego omówienia.
Vrms2 Control
Jedną z najważniejszych cech w większości powszechnie stosowanych konstrukcji PFC jest sygnał odniesienia, który musi być imitacją skoku w dół wyprostowanego napięcia wejściowego.
Ten zminimalizowany, wyprostowany odpowiednik napięcia wejściowego jest ostatecznie doprowadzany do obwodu w celu ukształtowania prawidłowego przebiegu dla prądu wyjściowego.
Jak omówiono powyżej, stopień obwodu powielającego jest zwykle stosowany do tej operacji, ale jak wiemy, stopień obwodu powielającego może być stosunkowo mniej opłacalny niż tradycyjny układ mnożący z dwoma wejściami.
Klasyczny przykładowy układ, który można zobaczyć na rysunku poniżej, przedstawia podejście PFC w trybie ciągłym.
Jak widać, tutaj przetwornica podwyższająca napięcie jest wyzwalana za pomocą średniego PWM trybu prądowego, który staje się odpowiedzialny za wymiarowanie prądu cewki indukcyjnej (prąd wejściowy dla przekształtnika) w odniesieniu do sygnału sterującego prądu V (i) , co może być postrzegane jako przeskalowany odpowiednik napięcia wejściowego V (in) do części VDIV.
Jest to realizowane przez podzielenie sygnału napięcia błędu przez kwadrat sygnału napięcia wejściowego (wygładzonego przez kondensator Cf, w celu uzyskania uproszczonego współczynnika skalowania w odniesieniu do poziomu napięcia wejściowego).

Chociaż może się wydawać trochę niezręczne, aby zobaczyć, jak sygnał błędu jest podzielony przez kwadrat napięcia wejściowego, powodem tego pomiaru jest utworzenie wzmocnienia pętli (lub odpowiedzi zależnej od stanu przejściowego), które może nie być oparte na napięciu wejściowym wyzwalanie.
Podniesienie do kwadratu napięcia na mianowniku neutralizuje wartość Vsin wraz z funkcją przenoszenia sterowania PWM (proporcjonalność nachylenia wykresu prądu induktora do napięcia wejściowego).
Jednak jedną wadą tej formy PFC jest elastyczność mnożnika, która wymusza na tym etapie nieco przeprojektowanie, zwłaszcza sekcje obsługi mocy obwodu, dzięki czemu wytrzymuje nawet najgorsze scenariusze rozpraszania mocy.
Kontrola trybu średniego prądu
Na powyższym rysunku możemy zobaczyć, jak sygnał odniesienia wytworzony z mnożnika V (i) oznacza kształt fali i zakres skalowania prądu wejściowego PFC.
Wskazany stopień PWM staje się odpowiedzialny za zapewnienie średniego prądu wejściowego na równi z wartością odniesienia. Procedura jest wykonywana przez średni stopień kontrolera trybu prądu, jak widać na poniższym rysunku.

Sterowanie w trybie średniego prądu jest zasadniczo skonfigurowane do regulowania średniego prądu (wejście / wyjście) w odniesieniu do sygnału sterującego Icp, który z kolei jest tworzony przez zastosowanie pętli prądu stałego o niskiej częstotliwości przez stopień obwodu wzmacniacza błędu, a to nic innego jak równoważny prąd odpowiadający sygnałowi Vi, który jest pokazany na wcześniejszym rysunku.
Stopniowy wzmacniacz prądu działa jako integrator prądu, jak również wzmacniacz błędu, w celu regulacji kształtu przebiegu, podczas gdy sygnał Icp, który jest generowany na Rcp, staje się odpowiedzialny za wykonywanie regulacji napięcia wejściowego DC.
Aby zapewnić liniową odpowiedź ze wzmacniacza prądu, jego wejście musi być podobne, co oznacza, że różnica potencjałów generowana na R (boczniku) musi być podobna do napięcia generowanego wokół Rcp, ponieważ nie możemy mieć DC przez Wejście rezystora nieodwracającego wzmacniacza prądu.
Wyjście generowane przez wzmacniacz prądowy ma być sygnałem błędu „niskiej częstotliwości” w zależności od średniego prądu bocznika, jak również sygnału z Isp.
Teraz oscylator generuje sygnał piłokształtny, który jest używany do porównania powyższego sygnału z nim, tak samo jak w przypadku projektu sterowania trybem napięciowym.
Powoduje to powstanie PWM wyznaczonych przez porównanie wyżej wymienionych dwóch sygnałów.
Zaawansowane rozwiązania PFC
Różne metody regulacji PFC omówione powyżej (CrM, CCM, DCM) i ich warianty zapewniają projektantom różnorodne opcje konfiguracji obwodów PFC.
Jednak pomimo tych opcji konsekwentne poszukiwanie lepszych i bardziej zaawansowanych modułów pod względem wydajności umożliwiło diagnozowanie bardziej wyrafinowanych projektów pod kątem tych zastosowań.
Omówimy więcej na ten temat, ponieważ ten artykuł zostanie zaktualizowany o najnowsze informacje na ten temat.
Poprzedni: Jak wybrać odpowiednią ładowarkę do akumulatora litowo-jonowego Dalej: Obwód rikszy Solar E.