W tym poście dowiadujemy się, jak zrobić prosty elektryczny wózek inwalidzki przy użyciu standardowego obwodu sterownika silnika BLDC i kilku silników BLDC o dużej mocy.
Wprowadzenie
Wprowadzenie elektrycznego wózka inwalidzkiego było dobrodziejstwem dla wielu naszych przyjaciół o różnych zdolnościach, którym teraz znacznie łatwiej jest się poruszać i podróżować bez wysiłku, za jednym naciśnięciem przycisku.
Jedyną kosztowną i skomplikowaną częścią konstrukcji wózka inwalidzkiego są obliczenia ergonomiczne i sprawność mechanizmu kół, podczas gdy elektronika do sterowania systemem wydaje się być porównywalnie tańsza i złożona.
Jeśli producent ma dostęp do najbardziej efektywnego ergonomicznego projektu wózka inwalidzkiego, wówczas wykonanie części elektrycznej / elektronicznej systemu można szybko wdrożyć, wykonując kroki opisane w poniższym objaśnieniu.
Specyfikacje
Aby wykonać elektryczny wózek inwalidzki, główne wymagane do tego elementy mogą być zgodne z poniższą listą:
1) Silniki BLDC - 2nos (po 250 watów)

2) Montaż nadwozia wózka inwalidzkiego
3) Obwód sterownika BLDC
4) Akumulator o głębokim cyklu lub najlepiej Li-ion - po 2 szt. 24V 60AH

Z wyjątkiem obwodu sterownika BLDC, pozostałe materiały można nabyć w postaci gotowej na rynku.
Chociaż przedstawiłem wiele obwodów sterownika BLDC na tej stronie, wybiorę ten, który wygląda bardziej obiecująco i efektywnie ze względu na jego elastyczne funkcje pod względem specyfikacji silnika i zdolności przenoszenia mocy.
W ostatnim poście omówiłem jeszcze stosunkowo prosty uniwersalny obwód sterownika BLDC wykorzystujący IC ML4425 i będzie wykorzystywać ten sam projekt w naszym obecnym obwodzie sterownika silnika elektrycznego wózka inwalidzkiego.
Ze względu na specyfikacje bezczujnikowe, obwód pozwala na włączenie dowolnego typu silnika 3-fazowego, niezależnie od tego, czy ma czujniki, czy nie, i bez żadnych ograniczeń co do ograniczenia prądu (Amp) wymaganego do napędzania silnika.
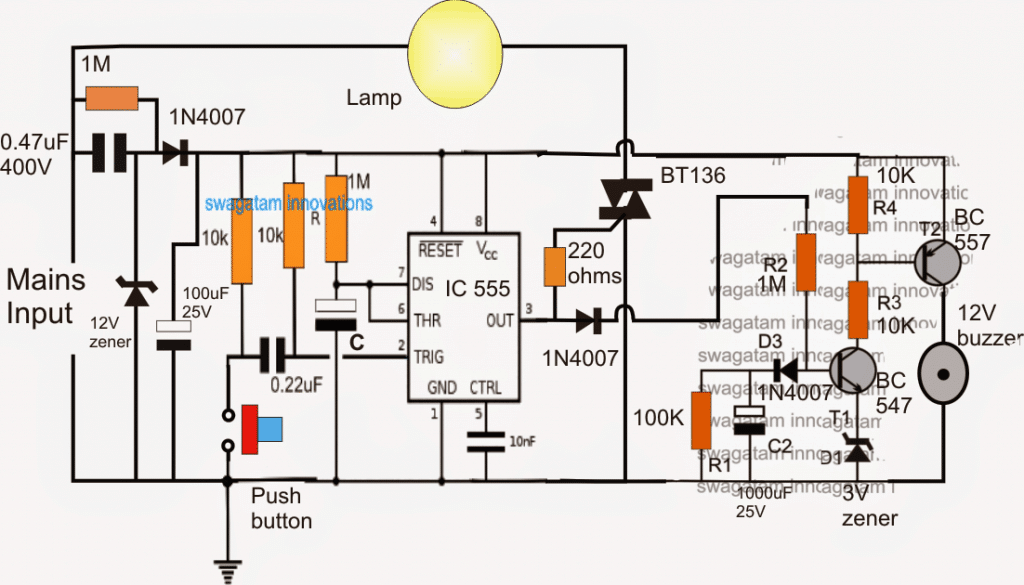
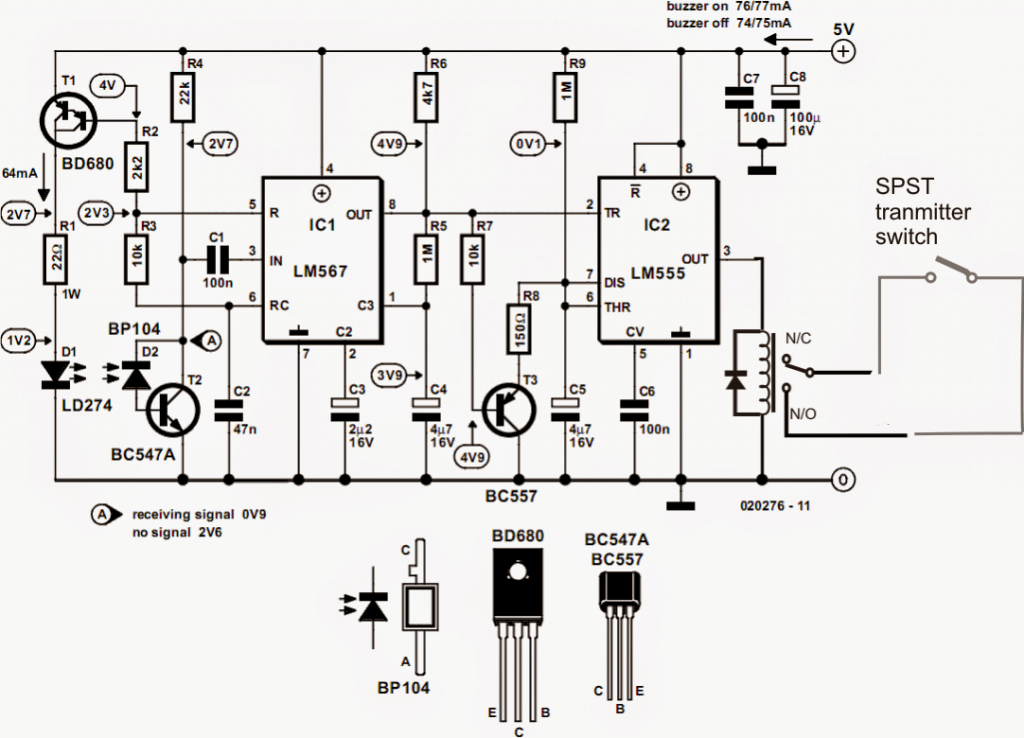
Pełny schemat można zobaczyć na poniższym obrazku:
Schematy obwodów

Plik dane techniczne dla powyższego bezczujnikowego sterownika BLDC zostały już wyjaśnione w naszym poprzednim poście, dlatego możesz odnieść się do tego samego, aby poznać szczegóły.
Elementy sterujące są w rzeczywistości dość łatwe i umożliwiałyby łatwe sterowanie i manewrowanie przez użytkownika obsługującego wózek inwalidzki.
Przełącznik RUN / BRAKE może być pojedynczym przełącznikiem DPDT o dużej wytrzymałości, który może być używany przez operatora do natychmiastowego zatrzymania wózka inwalidzkiego w razie potrzeby.
Prędkość wózka można po prostu kontrolować, przesuwając pokrętło R18 zgodnie z ruchem wskazówek zegara / przeciwnie do ruchu wskazówek zegara. Ten garnek musi być bardzo dobrej jakości, najlepiej wieloobrotowy, jak pokazano poniżej.
Specyfikacje potencjometru

Napięcie zasilania ma szeroki zakres, zaczynając od 24 V do 80 V, co oznacza, że więcej akumulatorów można łączyć szeregowo w celu obsługi silników o wyższym napięciu, co z kolei pozwoliłoby producentowi na zastosowanie mniejszych silników i akumulatorów, zapewniając kompaktowe i lżejsze wózki inwalidzkie .
Oba silniki sprzężone z tylnymi kołami można było połączyć równolegle i napędzać za pomocą pokazanego powyżej obwodu sterownika BLDC.
Jeśli masz jakieś szczegółowe pytania dotyczące opisanego powyżej obwodu elektrycznego wózka inwalidzkiego z silnikiem BLDC, nie wahaj się wyrazić ich za pomocą poniższego pola wyszukiwania.
AKTUALIZACJA:
Powyższy projekt nie ma kluczowej funkcji cofania silnika, ulepszony projekt z funkcją cofania można znaleźć w następującym arkuszu danych PDF:
https://www.elprocus.com/wp-content/uploads/2018/04/BLDC-driver.pdf
Klip wideo:
Poprzedni: Wysokoprądowy bezczujnikowy sterownik silnika BLDC wykorzystujący Back EMF Dalej: Jak działają latarki korbowe