
Zwykle roboty zdalnie sterowane wykorzystują obwody RF, które mają wady w postaci ograniczonego zasięgu pracy, ograniczonej kontroli i ograniczonego zakresu częstotliwości. Aby pokonać te wady, land rover obsługiwany przez telefon komórkowy używany jest zrobotyzowany pojazd. Zapewnia zalety sterowania robotami, kontrolerów bez włamań i do dwunastu systemów sterowania itp.
Chociaż możliwości i wygląd wbudowana robotyka różnią się znacznie, wszystkie roboty mają wspólne cechy ruchomej, mechanicznej struktury podlegającej pewnej formie kontroli. Kontrola robotów obejmuje trzy różne fazy: percepcję, przetwarzanie i działanie. Zwykle czujniki są zamontowane na robocie. Za percepcję i przetwarzanie odpowiada wbudowany mikrokontroler, a do działania służą silniki.
Pojazd robotyczny Land Rover obsługiwany przez telefon komórkowy

Robotyczny pojazd Land Rover obsługiwany przez telefon komórkowy firmy Edgefxkits.com
Głównym celem tego projektu jest sterowanie ramieniem robota, które jest montowane na zautomatyzowanym pojeździe za pomocą telefonu komórkowego. Zapewnia duży zakres roboczy i solidną kontrolę itp.
Schemat blokowy robota Land Rover obsługiwanego przez telefon komórkowy:

Schemat blokowy Land Rovera obsługiwanego przez telefon komórkowy
Głównymi elementami składowymi są mikrokontroler, telefon komórkowy, dekoder DTMF i obwód sterownika silnika prądu stałego. Telefon komórkowy jest najważniejszą częścią całego systemu, ponieważ cały system działa i jest aktywowany przez telefon komórkowy. DTMF (podwójna częstotliwość wielotonowa) odbiera sygnał wejściowy z telefonu komórkowego i dekoduje go, a następnie generuje 4-bitowe cyfrowe wyjście pliku Mikrokontroler 8051 . Kiedy dekoder DTMF daje wyjście cyfrowe, za każdym razem generuje również przerwanie.
Mikrokontroler jest sercem całego systemu, ponieważ realizuje wszystkie czynności kontrolne. Mikrokontroler zależy od kodu, który jest generowany przez dekoder DTMF, aby przesuwać łazik w prawo lub w lewo i do przodu lub do tyłu poprzez obracanie obu silników prądu stałego. Sterownik silnika prądu stałego odbiera sygnały aktywujące z mikrokontrolera w zakresie logiki niskiej lub wysokiej, następnie wzmacnia i obraca dwa silniki w obu kierunkach.
Sterowanie robotem obejmuje głównie cztery różne fazy: percepcję, przetwarzanie działań i wykrywanie. Na etapie percepcji, jeśli telefon komórkowy podłączony do robota odbiera połączenie, naciśnięcie klawisza na telefonie komórkowym dekoduje wygenerowany ton DTMF. Następnie układ dekodera odbiera sygnał audio z telefonu komórkowego, a następnie konwertuje ton DTMF na kod binarny, który jest następnie podawany do mikrokontrolera. W tym projekcie układ scalony MT88710 jest używany jako dekoder DTMF. Na etapie przetwarzania mikrokontroler przetwarza kod binarny, który jest odbierany z dekodera DTMF. Plik Mikrokontroler jest wstępnie zaprogramowany w „C” do wykonania tego konkretnego zadania zgodnie z bitami wejściowymi.
Na etapie działania obrót silników zależy od sygnału wejściowego podawanego przez mikrokontroler. Landrover wykorzystuje dwa silniki prądu stałego o prędkości obrotowej 30 obr./min, które są napędzane przez układ scalony sterownika silnika. Po wykryciu sceny i wykryciu przeszkody, nadajnik i odbiornik podczerwieni są używane razem z brzęczykiem. Gdy przeszkoda znajdzie się przed robotem, nadajnik podczerwieni przesyła promienie podczerwone na obiekt, po czym obiekt odbija promienie podczerwone do odbiornika podczerwieni. Odbiornik podczerwieni odbiera następnie promienie podczerwone, aby aktywować brzęczyk.
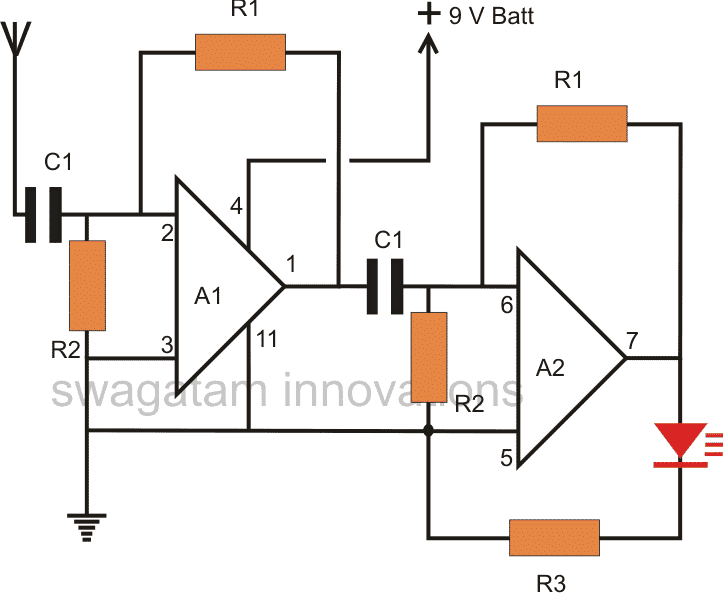
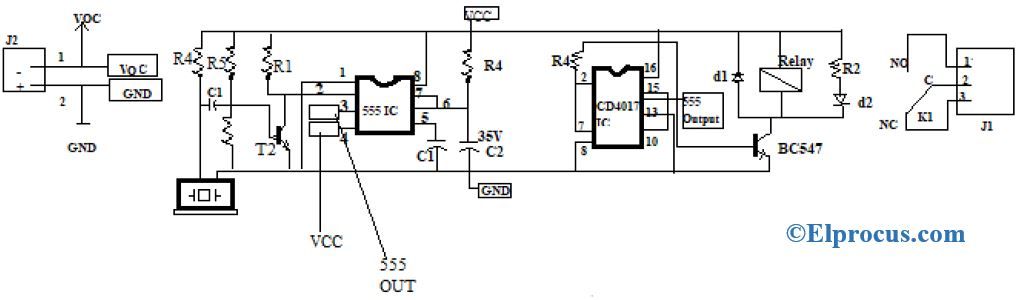
Schemat obwodu robota robota land rover obsługiwanego przez telefon komórkowy:
Głównymi elementami tego robota Landrover obsługiwanego przez telefon komórkowy są mikrokontroler, sterownik silnika i dekoder DTMF. W tym projekcie zastosowano dekoder DTMF serii MT8870, który wykorzystuje cyfrowe techniki zliczania do wykrywania 16 par tonów DTMF na 4-bitowym wyjściu kodu. Wbudowany obwód wybierania eliminuje filtrowanie wstępne. Jeśli sygnał wejściowy zostanie podany na styku 2, wówczas konfiguracja wejścia jest rozpoznawana jako skuteczna. 4-bitowy sygnał dekodowania tonu DTMF jest przesyłany do styku 11 przez wyjście styku 14. Piny te są podłączone do pinów mikrokontrolera Pao, Pa1, Pa2 i Pa3. Wyjście mikrokontrolera z pinów portu PD0 do PD3 i PD7 jest podawane na wejścia IN1, IN4 i włącza piny EN1, EN2 sterownika silnika L293D IC do napędzać dwa silniki prądu stałego .

Schemat obwodu Land Rovera obsługiwanego przez telefon komórkowy
W tym obwodzie przełącznik S1 służy do ręcznego resetowania. Wyjście mikrokontrolera nie wystarcza do sterowania silnikami prądu stałego, dlatego do obrotów silnika niezbędne są sterowniki prądowe. łatwiejsze do napędzania silników prądu stałego. Sterownik silnika L293D składa się z czterech przetworników. Piny od IN1 do IN4 i OUT1 i OUT4 to piny wejściowe i wyjściowe sterowników od 1 do 4. Sterowniki 1, 2, 3 i 4 są włączane przez styk 1 (EN1) i styk 9 (EN2). Gdy wejście EN1 (pin1) jest włączone, sterowniki 1 i 2 są włączone. Podobnie wejście włączające EN2 (pin9) włącza sterowniki 3.
Zalety i wady:
Zalety robotów Landrover obsługiwanych przez telefony komórkowe obejmują bezprzewodowy system sterowania i nadzoru, nawigację samochodową opartą na technologii 3G oraz nieograniczony zasięg operacyjny oparty na sieci telefonu komórkowego. Wadą są: koszt, ponieważ rachunek za telefon komórkowy jest wysoki mobilne baterie rozładowują się : problem rozładowania związany z akumulatorami, ponieważ utrata akumulatorów jest ładowana z powodu szybkiego rozładowania, ponieważ obciążenie jest duże, przystosowalne: systemu nie można dostosować do wszystkich telefonów komórkowych, ale te z dołączonym zestawem słuchawkowym mogą być używane tylko.
Dlatego ten projekt robota obsługiwanego przez telefon komórkowy jest bardzo przydatny w zastosowaniach wojskowych do sterowania pojazdami wojskowymi za pomocą telefonu komórkowego. W przyszłości będziemy mogli wykrywać pozycję wrogów, ustawiając kamera bezprzewodowa do robota-robota Land Rover. Projekt ten może być również pomocny w środowisku akademickim, ponieważ uczniowie mogą nauczyć się różnych terminologii i zasad zaproponowanych w tym projekcie. Ten projekt pomoże uczniom dodać swoje innowacyjne myśli i pomysły do rozwijać projekty robotyki .
Kredyty fotograficzne:
- Land Rover obsługiwany przez telefon komórkowy wg santoshbanisetty
- Schemat obwodu Land Rovera obsługiwanego przez telefon komórkowy wg garaż inżynieryjny





{kind=link}