
Wprowadzenie do systemów wbudowanych
System, w którym dedykowane przeznaczenie oprogramowania jest osadzone w projekcie sprzętu, jest znany jako system wbudowany. Ten system może być niezależnym systemem lub większym systemem. Oprogramowanie zwykle jest osadzane w moduły pamięci jako ROM i nie potrzebuje dodatkowej pamięci, jak w komputerze. Telekomunikacja, karty inteligentne, pociski, sieci komputerowe, cyfrowa elektronika użytkowa i satelity to tylko niektóre z aplikacji systemów wbudowanych.

Aplikacje systemów wbudowanych
Aplikacje systemów wbudowanych obejmują robotykę, kamerę cyfrową, zabawki wielozadaniowe, systemy gotowania i mycia, systemy biomedyczne, kontrolery klawiatury, telefony komórkowe i smartfony, systemy komputerowe, elektroniczny inteligentny system wyświetlania wagi i systemy rozrywkowe, takie jak filmy, gry, system muzyczny gry wideo i tak dalej.
Proces projektowania systemów wbudowanych można to zrobić najpierw poprzez symulację, która jest używana do testowania obwodu, ponieważ zmiana sprzętu staje się bardzo trudna, jeśli obwód działa nieprawidłowo. Jeśli wyniki będą zgodne z pożądanymi, proces będzie projektowany na stałe przez sekwencyjne procesy waflowe.
Podstawy systemów wbudowanych
Systemy wbudowane są przeznaczone do wykonywania określonych zadań, ale nie mogą być używane jako komputery ogólnego przeznaczenia do wykonywania innych zadań. Oprogramowanie systemu wbudowanego jest zwykle określane jako oprogramowanie układowe, które może być przechowywane na dysku lub w pojedynczym układzie scalonym. Dwa główne elementy systemów to:
- Wbudowany sprzęt systemowy
- Wbudowane oprogramowanie systemowe

Sprzęt i oprogramowanie systemu wbudowanego
Wbudowany sprzęt systemowy : System wbudowany wymaga platformy sprzętowej do interakcji z różnymi wejściami i wyjściami lub zmiennymi w czasie rzeczywistym. Sprzęt zawiera kontroler podobny mikrokontroler lub mikroprocesor , moduły pamięci, interfejsy I / O, systemy wyświetlania i moduły komunikacyjne itp.
Wbudowane oprogramowanie systemowe : To oprogramowanie umożliwia programowanie w żądany sposób, tak aby sterować różnymi operacjami. Jest napisany w formacie wysokiego poziomu, skompilowany do kodu, a następnie zrzucony do kontrolerów sprzętowych.
Systemy wbudowane w czasie rzeczywistym to systemy komputerowe, które wykonują czynności, takie jak monitorowanie, reagowanie i kontrolowanie ruchu zewnętrznego. Środowisko zewnętrzne jest połączone z systemem komputerowym poprzez czujniki , siłowniki i interfejsy I / O. Prawdziwy system komputerowy wbudowany w system komputerowy jest znany jako system osadzony czasu rzeczywistego. Wbudowany system czasu rzeczywistego jest używany w różnych dziedzinach, takich jak wojsko, sektor rządowy i medycyna.
Zrobotyzowane projekty czasu rzeczywistego w systemach wbudowanych
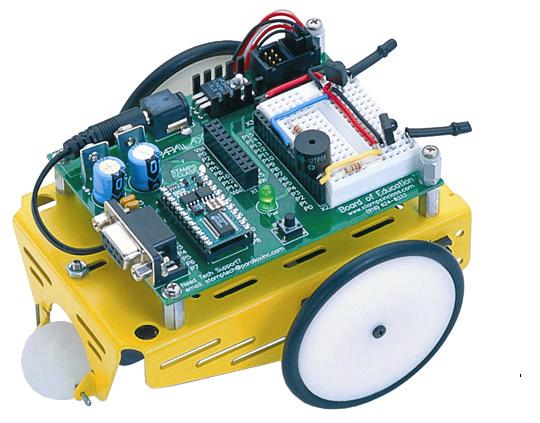
Systemy wbudowane może być używany w wielu aplikacjach czasu rzeczywistego, takich jak samochody, robotyka, przemysł itp. Poniżej projekty czasu rzeczywistego są związane z technologią robotyki .
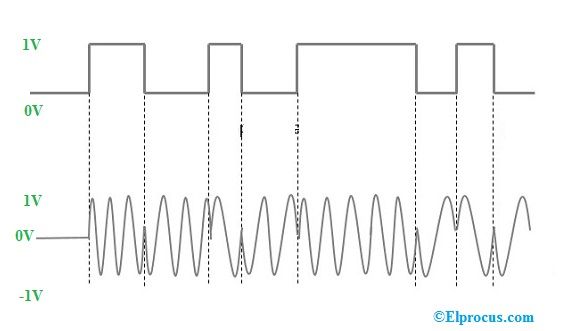
1. Robot sterowany głosem z rozpoznawaniem mowy na duże odległości
Celem tego projektu jest sterowanie robotem za pomocą poleceń głosowych w celu zdalnej obsługi. Na Mikrokontroler 8051 jest używany z modułem rozpoznawania mowy w celu wykonania żądanej operacji. Wykorzystuje mikrokontroler 8051, moduł rozpoznawania mowy, przycisk, moduł RF, koder, dekoder, układ scalony sterownika silnika, silniki prądu stałego, baterie i inne różne komponenty.

Zautomatyzowany pojazd sterowany głosem - nadajnik
Ruchy pojazdu, takie jak w lewo, w prawo, w górę i w dół, można wykonywać za pomocą przycisków lub poleceń głosowych przez moduł rozpoznawania mowy, który jest połączony z mikrokontrolerem. Tutaj enkoder jest używany do kodowania poleceń wydawanych mikrokontrolerowi za pomocą nadajnik RF do przesyłania sygnałów na częstotliwości 433 MHz.
Dlatego też, gdy mikrosterownik odbiera sygnały, które pojawiają się po naciśnięciu przycisków lub sygnały poleceń głosowych odpowiadające ruchowi, wysyła sygnały sterujące do obwodu odbiornika poprzez moduł nadajnika.

Sterowany głosem robot-odbiornik pojazdu
Po odebraniu tych sygnałów, odbiornik RF przesyła te sygnały do obwodu dekodera, w którym dane binarne są przekształcane na sygnał na poziomie mikrokontrolera. Dlatego mikrokontroler wykonuje żądany ruch z obwodu nadajnika. Moduł laserowy jest połączony z mikrokontrolerem do wykrywania operacji wykonywanych przez robota nawet w ciemnych miejscach.
2. Zautomatyzowany pojazd zdalnie sterowany z ekranem dotykowym do zarządzania sklepem
Ten projekt obejmuje sterowanie robotem za pomocą ekranu dotykowego jednostka do obsługi zdalnej. Panel z ekranem dotykowym jest umieszczony na końcu nadajnika, a robot typu pick-n-place jest umieszczony na końcu odbiornika, aby wykonać zadanie poprzez reagowanie na sygnały. Komponenty sprzętowe użyte w tym projekcie obejmują mikrokontroler 8051, panel z ekranem dotykowym, anteny (strona nadajnik-odbiornik), enkoder, dekoder, silniki prądu stałego, korpus robota, akumulator itp.

Robotyczny nadajnik pojazdu oparty na ekranie dotykowym
Jak omówiono w module rozpoznawania mowy w powyższym projekcie, w tym projekcie również moduł ekranu dotykowego wysyła sygnały sterujące odpowiadające ruchowi pojazdu do mikrokontrolera. Sterownik następnie wysyła te sygnały do kodera, a następnie do nadajnika, który ostatecznie przesyła sygnały do obwodu odbiornika.

Robot-odbiornik samochodowy oparty na ekranie dotykowym
Antena umieszczona na końcu odbiornika odbiera sygnały RF z anteny nadawczej i dekoduje dane, a następnie wysyła te dane do mikrokontrolera. Ta konfiguracja ma cztery silniki połączone z mikrokontrolerem: dwa silniki do ruchu ramienia i chwytaka oraz dwa pozostałe do ruchu ciała. Wszystkie te silniki są napędzane przez układ scalony sterownika silnika, który w sposób ciągły otrzymuje polecenia z mikrokontrolera.
To są dwa aplikacje systemów wbudowanych w dziedzinie robotyki. Przykłady systemów wbudowanych w czasie rzeczywistym mogły zapewnić lepsze zrozumienie koncepcji systemów wbudowanych. Jeśli masz dalsze wątpliwości co do realizacji tych projektów, możesz skontaktować się z nami, komentując poniżej.
Kredyty fotograficzne
- Aplikacje systemów wbudowanych oocities
- Sprzęt i oprogramowanie systemu wbudowanego dca-design







{kind=link}