Robot typu pick and place to ten, który służy do podnoszenia przedmiotu i umieszczania go w żądanym miejscu. Może to być robot cylindryczny zapewniający ruch w osi poziomej, pionowej i obrotowej, robot kulisty zapewniający dwa ruchy obrotowe i jeden liniowy, robot przegubowy lub robot scara (roboty stałe z obrotowymi ramionami o 3 osiach pionowych).
Zalety
Zanim przejdziemy dalej, zobaczmy kilka powodów, dla których preferowane są roboty typu pick and place:
- Są szybsze i mogą wykonać pracę w ciągu kilku sekund w porównaniu z ich ludzkimi odpowiednikami.
- Są elastyczne i mają odpowiedni design.
- Są dokładne.
- Zwiększają bezpieczeństwo środowiska pracy i nigdy się nie męczą.
Części robota Pick N Place

Robot Pick N Place
Zobaczmy, z czego właściwie składa się robot typu pick and place:
- Do Rovera : Jest to główny korpus robota składający się z kilku sztywnych ciał, takich jak cylinder lub kula, przegubów i ogniw. Znany jest również jako manipulator.
- End Effector : Jest to ciało połączone z ostatnim przegubem łazika, które służy do chwytania lub przenoszenia przedmiotów. Może to być analogia do ramienia człowieka.
- Siłowniki : Oni są kierowcami robota. W rzeczywistości uruchamia robota. Może to być dowolny silnik, taki jak silnik serwo, silnik krokowy lub siłowniki pneumatyczne lub hydrauliczne.
- Czujniki: Służą do wykrywania stanu wewnętrznego i zewnętrznego, aby upewnić się, że robot jako całość działa płynnie. Czujniki obejmują czujniki dotykowe, czujnik podczerwieni itp.
- Kontroler : Służy do sterowania siłownikami w oparciu o sprzężenie zwrotne czujnika, a tym samym do sterowania ruchem każdego przegubu i ostatecznie ruchem efektora końcowego.
Działanie podstawowego robota Pick N Place:
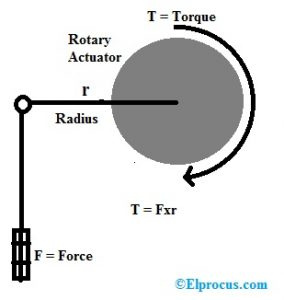
Podstawowa funkcja a wybierz i umieść robota odbywa się za pomocą stawów. Stawy są analogiczne do ludzkich stawów i służą do łączenia dwóch kolejnych sztywnych ciał robota. Mogą to być złącza obrotowe lub liniowe. Aby dodać połączenie do dowolnego ogniwa robota, musimy znać stopnie swobody i stopnie ruchu tej części ciała. Stopnie swobody realizują liniowy i obrotowy ruch ciała, a stopnie ruchu oznaczają liczbę osi, w których ciało może się poruszać.

Prosty robot Pick N Place
Prosty robot typu pick and place składa się z dwóch sztywnych korpusów na ruchomej podstawie, połączonych przegubem obrotowym. Złącze obrotowe to takie, które zapewnia obrót o 360 stopni wokół dowolnej z osi.
- Dno lub podstawa jest mocowana za pomocą kółek, które zapewniają ruch liniowy.
- 1śwsztywny korpus jest zamocowany i podpiera drugi sztywny korpus, do którego jest przymocowany efektor końcowy.
- 2ndsztywny korpus jest wyposażony w ruch we wszystkich 3 osiach i ma 3 stopnie swobody. Jest podłączony do 1śwkorpus z obrotowym przegubem.
- Efektor końcowy powinien mieć wszystkie 6 stopni swobody, aby dotrzeć do wszystkich stron elementu i zająć pozycję na dowolnej wysokości.
Ogólnie rzecz biorąc, podstawowy robot typu pick and place działa w następujący sposób:
- Koła pod podstawą pomagają przenieść robota w wybrane miejsce.
- Sztywny korpus podtrzymujący efektor końcowy wygina się lub prostuje do pozycji, w której obiekt jest umieszczony.
- Efektor końcowy podnosi przedmiot mocnym uchwytem i ustawia go w żądanej pozycji.
Teraz, gdy mamy już krótkie pojęcie o robocie typu „pick and place”, podstawowe pytanie brzmi: w jaki sposób jest on faktycznie sterowany.
Prostym robotem typu pick and place można sterować, kontrolując ruch jego efektora końcowego. Ruch może odbywać się za pomocą ruchu hydraulicznego, tj. Z wykorzystaniem płynu hydraulicznego pod ciśnieniem do napędu robota lub z wykorzystaniem ruchu pneumatycznego, tj. Z wykorzystaniem sprężonego powietrza do wywołania ruchu mechanicznego. Jednak najbardziej efektywnym sposobem jest użycie silników do zapewnienia wymaganego ruchu. Silniki muszą być sterowane, aby zapewnić wymagany ruch robota i efektora końcowego.
Roboczy przykład sterowania robotem Pick N Place
Co powiesz na sterowanie robotem za pomocą zaledwie kilku przycisków na klawiaturze? Tak to mozliwe! Wystarczy nacisnąć odpowiedni przycisk, aby wysłać polecenie do robota, aby poruszał się w dowolnym kierunku, aby wykonać nasze zadanie. Ponadto można to osiągnąć za pomocą prostej komunikacji bezprzewodowej.
Zobaczmy, jak to faktycznie działa:
Część nadajnika składa się z klawiatury połączonej z mikrokontrolerem. Dowolny numer przycisku w formacie dziesiętnym jest konwertowany przez mikrokontroler na czterocyfrową liczbę binarną, a wyjście równoległe na jednym z jego portów jest podawane do kodera. Enkoder konwertuje te równoległe dane na dane szeregowe i są one podawane do nadajnika wyposażonego w antenę do przesyłania danych szeregowych.

Schemat blokowy przedstawiający nadajnik robota Pick N Place
Strona odbiornika składa się z dekodera połączonego z mikrokontrolerem. Dekoder konwertuje odebrane polecenie w formacie szeregowym na postać równoległą i przekazuje te dane do mikrokontrolera. Na podstawie tego polecenia mikrokontroler wysyła odpowiednie sygnały wejściowe do sterowników silników, aby sterować odpowiednimi silnikami.

Schemat blokowy przedstawiający odbiornik robota Pick N Place
System składa się z dwóch silników zapewniających ruch całego robota i dwóch innych silników zapewniających ruch ramienia. Efektor końcowy lub chwytak muszą być kontrolowane, aby wywierać odpowiedni nacisk na przedmiot, aby skutecznie go obsługiwać, aby nadać mu miękki uchwyt . Zapewnia to sterowanie silnikami ramion za pomocą odpowiedniego polecenia. Sygnał wyjściowy z silników ramienia jest podłączony do rezystora 10 Ohm / 2W iw momencie przeciążenia silnika lub stanu zablokowania na rezystorze powstaje wysokie napięcie, co powoduje logiczny wysoki poziom na wyjściu optoizolatora i przerwanie pin mikrokontrolera podłączony do wyjścia optoizolatora poprzez tranzystor pnp otrzymuje niski sygnał logiczny, który zatrzymuje wszystkie inne operacje chwytaka.
W ten sposób poprzez prostą komunikację radiową możemy faktycznie sterować robotem typu „chwyć i umieść”.
Praktyczne zastosowania robota Pick and Place:
- Aplikacje obronne : Może być używany do inwigilacji, a także do podnoszenia szkodliwych obiektów, takich jak bomby, i bezpiecznego ich rozpraszania.
- Zastosowania przemysłowe : Te roboty są używane w produkcji, do podnoszenia wymaganych części i umieszczania ich w odpowiedniej pozycji, aby zakończyć mocowanie maszyny. Może być również używany do umieszczania przedmiotów na przenośniku taśmowym, a także do pobierania wadliwych produktów z przenośnika taśmowego.
- Aplikacje medyczne : Te roboty mogą być używane w różnych operacjach chirurgicznych, takich jak operacje wymiany stawów, operacje ortopedyczne i operacje wewnętrzne. Wykonuje operacje z większą precyzją i dokładnością.
Oprócz tych zastosowań roboty te mogą być również używane w różnych innych zastosowaniach odpowiednich dla ludzkości.
Teraz pozostaje pytanie - jak daleko jest dzień, w którym roboty całkowicie ułatwią ludziom drogę?