A siłownik działa jak siłownik obrotowy, który służy głównie do zmiany sygnału elektrycznego na przyspieszenie mechaniczne. Silnik ten działa w oparciu o serwomechanizm wszędzie tam, gdzie sprzężenie zwrotne położenia jest wykorzystywane do sterowania prędkością i ostatecznym położeniem silnika. Serwomotory obracają się i uzyskują określony kąt na podstawie zastosowanego sygnału wejściowego. Serwosilniki mają niewielkie rozmiary, ale są bardzo energooszczędne. Silniki te są podzielone na dwa typy, takie jak serwomotor prądu przemiennego i serwomotor prądu stałego, ale główną różnicą między tymi dwoma silnikami jest źródło wykorzystywanej mocy. Występ A Silnik serwo prądu stałego zależy głównie tylko od napięcia, podczas gdy serwosilnik prądu przemiennego zależy zarówno od napięcia, jak i częstotliwości. W tym artykule omówiono jeden z typów serwomotorów – an Silnik serwo AC – praca z aplikacjami.
Co to jest silnik AC Servo?
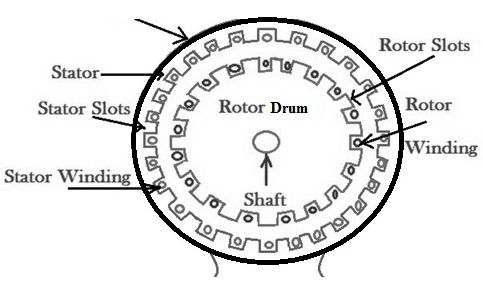
Typ serwomotoru, który generuje mechaniczną moc wyjściową za pomocą wejściowego prądu przemiennego w postaci dokładnej prędkości kątowej, nazywany jest serwomotorem prądu przemiennego. Moc wyjściowa uzyskiwana z tego serwomotoru waha się głównie od watów do kilku 100 watów. Częstotliwość robocza serwomotoru prądu przemiennego wynosi od 50 do 400 Hz. Schemat silnika serwo AC pokazano poniżej.

Główne cechy serwomotorów prądu przemiennego obejmują głównie; są to urządzenia o mniejszej masie, zapewniające stabilność i niezawodność podczas pracy, nie generuje hałasu podczas pracy, zapewniają liniową charakterystykę momentu obrotowego i prędkości oraz zmniejszają koszty konserwacji, gdy nie ma pierścieni ślizgowych i szczotek.
Proszę odnieść się do tego linku, aby dowiedzieć się więcej Typy silników serwo AC
Budowa silnika serwo prądu przemiennego
Zasadniczo serwosilnik prądu przemiennego jest dwufazowym silnikiem indukcyjnym. Ten silnik jest zbudowany przy użyciu stojana i a wirnik jak normalny silnik indukcyjny. Ogólnie rzecz biorąc, stojan tego serwomotoru ma laminowaną strukturę. Ten stojan zawiera dwa uzwojenia, które są rozmieszczone co 90 stopni w przestrzeni. Z powodu tej zmiany fazy generowane jest obrotowe pole magnetyczne.

Pierwsze uzwojenie jest znane jako uzwojenie główne lub znane również jako uzwojenie stałej fazy lub uzwojenie odniesienia. Tutaj uzwojenie główne jest aktywowane ze źródła stałego napięcia, podczas gdy drugie uzwojenie, takie jak uzwojenie sterujące lub faza sterująca, jest aktywowane przez zmienne napięcie sterujące. To napięcie sterujące jest po prostu dostarczane z serwowzmacniacza.

Ogólnie rzecz biorąc, wirnik jest dostępny w dwóch typach typu klatkowego i typu kubkowego. Wirnik zastosowany w tym silniku to normalny wirnik klatkowy, zawierający aluminiowe pręty zamocowane w szczelinach i zwarte przez pierścienie końcowe. Szczelina powietrzna jest utrzymywana na minimalnym poziomie dla maksymalnego połączenia strumienia. Drugi typ wirnika, taki jak kielich do przeciągania, jest używany głównie tam, gdzie bezwładność układu obrotowego spada. Pomaga to w zmniejszeniu zużycia energii.
Zasada działania serwomotoru AC
Zasada działania serwomotoru prądu przemiennego jest; po pierwsze, stałe napięcie przemienne jest podawane na główne uzwojenie rozrusznika serwomotoru, a kolejne zaciski stojana są po prostu podłączane do transformatora sterującego w całym uzwojeniu sterującym. Ze względu na przyłożone napięcie odniesienia, wał generatora synchronicznego będzie się obracał z określoną prędkością i uzyska określoną pozycję kątową.

Ponadto wał transformatora sterującego ma określone położenie kątowe, które jest porównywane z punktem kątowym wału synchronicznego generatora. Tak więc porównanie dwóch pozycji kątowych dostarczy sygnału błędu. Dokładniej, oceniane są poziomy napięcia dla równoważnych położeń wału, co daje sygnał błędu. Tak więc ten sygnał błędu komunikuje się z aktualnym poziomem napięcia na transformatorze sterującym. Następnie sygnał ten jest podawany do serwowzmacniacza, dzięki czemu generuje on nierówne napięcie sterujące.
Dzięki temu przyłożonemu napięciu wirnik ponownie osiąga określoną prędkość, zaczyna się obracać i utrzymuje, aż wartość sygnału błędu osiągnie zero, osiągając preferowaną pozycję silnika w serwomotorach prądu przemiennego.
Funkcja przenoszenia serwomotoru prądu przemiennego
Funkcję przenoszenia serwosilnika AC można zdefiniować jako stosunek LT (transformata Laplace'a) zmiennej wyjściowej do LT (transformata Laplace'a) zmiennej wejściowej. Tak więc to model matematyczny wyraża równanie różniczkowe, które mówi o/p do i/p systemu.
jeśli T. F. (funkcja przejścia) dowolnego systemu jest znana, wówczas można obliczyć odpowiedź wyjściową dla różnych typów wejść, aby rozpoznać naturę systemu. Podobnie, jeśli funkcja przenoszenia (TF) nie jest znana, można ją znaleźć eksperymentalnie, po prostu stosując znane dane wejściowe do urządzenia i badając wyjście systemu.
Serwosilnik AC jest dwufazowym silnikiem indukcyjnym, co oznacza, że ma dwa uzwojenia, takie jak uzwojenie sterujące (uzwojenie głównego pola) i uzwojenie odniesienia (uzwojenie ekscytujące).

Musimy więc znaleźć funkcję przenoszenia serwomotoru prądu przemiennego, tj. θ(s)/ec(s). Tutaj „θ(s)/” jest wyjściem systemu, podczas gdy ex(s) jest wejściem systemu.
Aby znaleźć funkcję przenoszenia silnika, musimy dowiedzieć się, jaki jest moment obrotowy wytwarzany przez silnik „Tm” i moment obrotowy rozwijany przez obciążenie „Tl”. Jeśli zrównamy warunek równowagi, np
Tm = Tl, wtedy możemy otrzymać funkcję przenoszenia.
Niech Tm = moment obrotowy wytwarzany przez silnik.
Tl = moment obrotowy wytworzony przez obciążenie lub moment obciążenia.
„θ” = przemieszczenie kątowe.
„ω” = d θ/dt = prędkość kątowa.
„J” = moment bezwładności obciążenia.
„B” to dashpot ładunku.
Tutaj dwie stałe, które należy wziąć pod uwagę, to K1 i K2.
„K1” to nachylenie charakterystyki napięcia fazy sterowania w funkcji momentu obrotowego.
„K2” to nachylenie charakterystyki prędkości i momentu obrotowego.
Tutaj moment obrotowy wytwarzany przez silnik jest po prostu oznaczony przez
Tm = K1ec-K2 dθ/dt —–(1)
Moment obciążenia (TL) można modelować, biorąc pod uwagę równanie równowagi momentu obrotowego.
Zastosowany moment obrotowy = przeciwny moment obrotowy wynikający z J,B
Tl = TJ + TB = J d^2θ/dt^2 + B dθ/dt^2 + B —–(2)
Wiemy, że warunek równowagi Tm = Tl.
K1ec- K2 dθ/dt = J d^2θ/dt^2 + B dθ/dt^2 + B
Zastosuj równanie transformacji Laplace'a do powyższego równania
K1Ec(s) – K2 S θ(S) = J S^2θ (S) + B S θ(S)
K1Ec(s) = JS^2θ (S) + BSθ(S)+ K2S θ(S)
K1Ec(s) = θ (S)[J S^2 + BS + K2S]
T.F = θ (S)Ec(s) = K1/ J S^2 + BS + K2S
= K1/ S [B + JS + K2]
= K1/ S [B + K2 + JS]
= K1/ S (B + K2) [1 + (J/ B + K2) *S]
T.F = θ (S)Ec(s) = K1/(B + K2) / S[1 + (J/ B + K2) *S]
T.F = Km / S[1 + (J/ B + K2) *S] => Km / S(1 + STm)] = θ (S)Ec(s)
T.F = Km / S(1 + STm)] = θ (S)Ec(s)
Gdzie, Km = K1/ B + K2 = stała wzmocnienia silnika.
Tm = J/ B + K2 = stała czasowa silnika.
Metody sterowania prędkością silnika serwo AC
Generalnie serwo Motoryzacja mają trzy metody sterowania, takie jak kontrola położenia, kontrola momentu obrotowego i kontrola prędkości.
Metoda sterowania położeniem służy do określania wielkości prędkości obrotowej poprzez zewnętrzne wejściowe sygnały częstotliwości. Kąt obrotu jest określony przez nr. roślin strączkowych. Położenie i prędkość serwomotoru można przypisać bezpośrednio za pomocą komunikacji. Ponieważ pozycja metody może mieć bardzo ścisłą kontrolę nad pozycją i prędkością, jest ona zwykle używana w aplikacji do pozycjonowania.
W metodzie sterowania momentem wyjściowy moment obrotowy serwomotoru jest ustawiany przez wejście analogowe pod adresem. Może zmienić moment obrotowy, po prostu zmieniając analog w czasie rzeczywistym. Ponadto może również zmienić wartość pod adresem względnym poprzez komunikację.
W trybie sterowania prędkością prędkość silnika może być kontrolowana przez wejście analogowe i impuls. Jeśli istnieją wymagania dotyczące precyzji i nie ma obaw o tak duży moment obrotowy, tryb prędkości jest lepszy.
Charakterystyka silnika AC Servo
Charakterystyki momentu obrotowego i prędkości serwomotoru prądu przemiennego przedstawiono poniżej. W poniższych charakterystykach moment obrotowy zmienia się wraz z prędkością, ale nie liniowo, ponieważ zależy głównie od stosunku reaktancji (X) do opór (R). Niska wartość tego stosunku oznacza, że silnik ma wysoką rezystancję i niską reaktancję, w takich przypadkach charakterystyka silnika jest bardziej liniowa niż wysoka wartość stosunku reaktancji (X) do rezystancji (R).

Zalety
Zalety serwosilników prądu przemiennego obejmują następujące elementy.
- Charakterystyka sterowania prędkością tego silnika jest dobra.
- Generują mniej ciepła.
- Oferują wysoką wydajność, większy moment obrotowy w przeliczeniu na wagę, niezawodność i zredukowany szum RF.
- Wymagają mniej konserwacji.
- Mają dłuższą oczekiwaną żywotność w przypadku braku komutatora.
- Silniki te są w stanie wytrzymać wyższe skoki prądu w maszynach przemysłowych.
- Przy dużych prędkościach oferują bardziej stały moment obrotowy.
- Te są wysoce niezawodne.
- Zapewniają wysoką wydajność.
- Są one dobrze przystosowane do zastosowań z niestabilnym obciążeniem.
Wady serwomotorów prądu przemiennego obejmują:
- Sterowanie serwosilnikiem AC jest trudniejsze.
- Silniki te mogą ulec uszkodzeniu przez ciągłe przeciążenie.
- Przekładnie są często niezbędne do przenoszenia mocy przy dużych prędkościach.
Aplikacje
Zastosowania serwomotorów prądu przemiennego obejmują następujące.
- Serwosilniki prądu przemiennego mają zastosowanie tam, gdzie regulacja położenia jest istotna i zwykle występuje w urządzeniach półprzewodnikowych, robotach, samolotach i obrabiarkach.
- Silniki te są stosowane w instrumentach działających na zasadzie serwomechanizmu, takich jak komputery i urządzenia do kontroli położenia.
- Silnik serwo prądu przemiennego jest stosowany w obrabiarkach, maszynach do robotyki i systemach śledzenia.
- Te serwomotory są używane w różnych gałęziach przemysłu ze względu na ich wydajność i wszechstronność.
- Serwosilnik AC jest stosowany w większości popularnych maszyn i urządzeń, takich jak podgrzewacze wody, piekarniki, pompy, pojazdy terenowe, sprzęt w ogrodach itp.
- Wiele urządzeń i narzędzi używanych na co dzień w domu jest napędzanych serwomotorami AC.
Jest to zatem przegląd ac serwomotory – działają z aplikacjami. Silniki te są wykorzystywane w wielu zastosowaniach, takich jak instrumenty działające na zasadzie serwomechanizmu, a także obrabiarki, systemy śledzenia i robotyka. Oto pytanie do ciebie, co to jest silnik indukcyjny?