W poście wyjaśniono innowacyjny obwód świateł hamowania wykorzystujący detekcję prędkości pojazdu, którym mógłby być motocykl. Obwód wyposażono w zaawansowany włącznik świateł hamowania ON, zapewniający znacznie bezpieczniejszą jazdę dla użytkownika. Pomysł został zgłoszony przez pana Rayana.
Cele i wymagania obwodu
- Mam pomysł, zazwyczaj światła stopu motocykla zapalają się tylko wtedy, gdy są włączone hamulce. Ale zazwyczaj prędkość motocykla jest redukowana przez zmianę biegów ... tak więc można zrobić obwód w taki sposób, że światła stopu zapalają się w zależności od prędkości zmniejszonej w silniku, nawet jeśli hamulce są włączone lub nie.
- W motocyklu ... Chcę zainstalować automatyczny reflektor. Automatyczny reflektor to taki, który zapala się, gdy silnik uruchamia się i gaśnie, gdy silnik jest wyłączony.
- A także możesz zrobić obwód, który ma automatyczny ściemniacz wraz z automatycznymi reflektorami .. !! A także w tym samym obwodzie. Powinienem też mieć punkt ładowania do ładowania telefonu komórkowego z baterii.
- A ja chcę zrobić tor, w którym zmiany biegów w motocyklu powinny być pokazane na ekranie ..! Tak samo jak lewy wskaźnik jest włączony, pokazuje, że wskaźnik został utworzony na ekranie.
- Podobnie, kiedy zmieniam biegi, powinno mi też pokazywać, na jakim biegu prowadzę motocykl.

Projektowanie
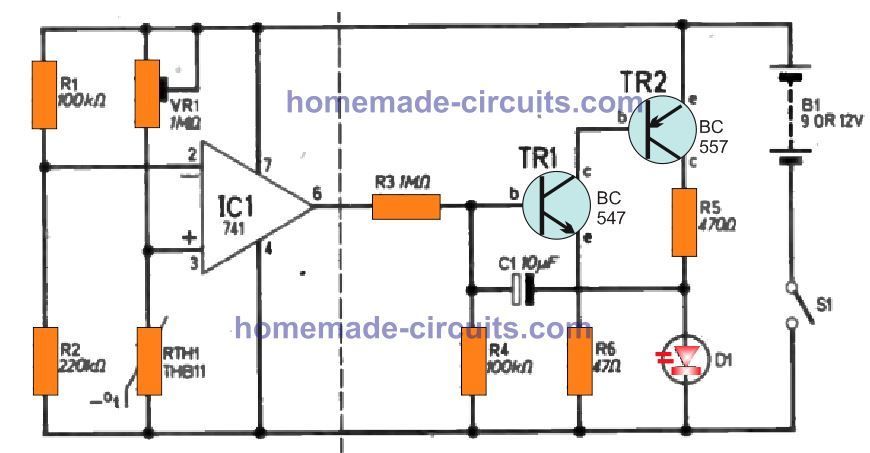
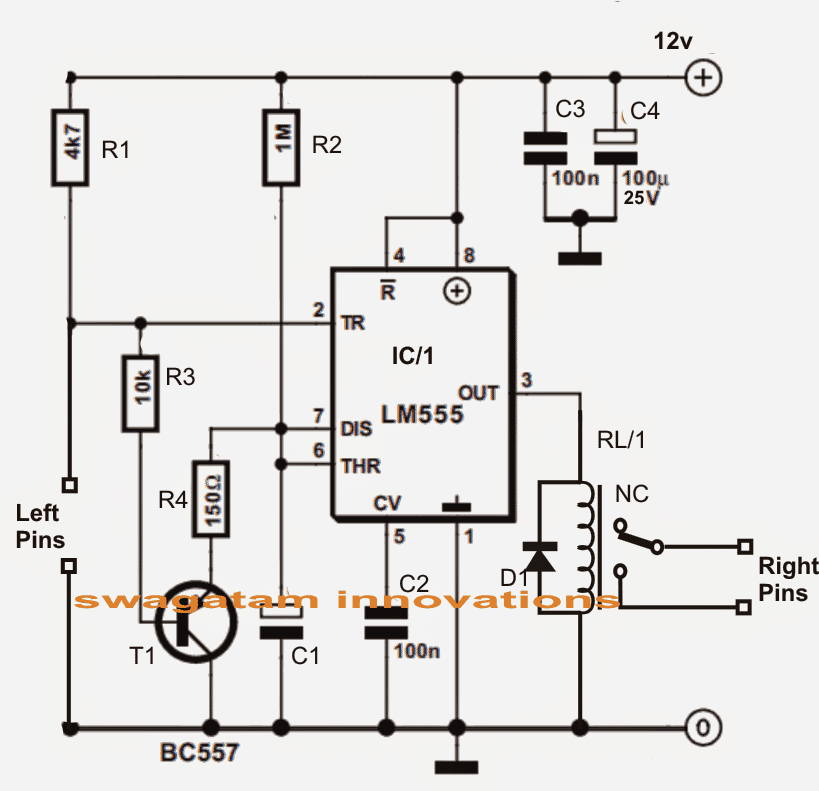
Jak pokazano na powyższym rysunku, proponowany obwód świateł hamowania wykorzystujący wykrywanie prędkości składa się z dwóch głównych etapów, a mianowicie stopnia obwodu obrotomierza IC 555 i kolejnego etapu obwodu sterownika diody LED trybu punktowego LM3915 IC.
Stopień obwodu obrotomierza jest skonfigurowany jako integrator do przetwarzania sygnałów zegarowych z odbiornika motocykla.
Cewka pobierająca przekształca prędkość silnika na odpowiednio zmieniające się częstotliwości taktowania (Hz), które są stosowane u podstawy BC547 związanej z obwodem IC 555.
Zegary te są przetwarzane i przekształcane w wykładniczo zmieniające się napięcie w sieci RC podłączonej za pomocą pinu nr 3 układu IC 555.
Powyższe zintegrowane wyjście jest podawane na wejście czujnikowe wskazanego stopnia sterownika punktowego LED LM3915.
10 diod LED podłączonych do styków wyjściowych LM3915 reaguje na wykładniczo rosnące i opadające poziomy napięcia z wyjścia IC 555 i odpowiednio generuje sekwencyjnie skokowe spadki logiczne na tych diodach LED, które świecą w identycznej kolejności od lewej do prawej, i nawzajem.
Ponieważ układ scalony jest skonfigurowany w trybie kropkowym, tylko jedna dioda LED zapala się na raz, wyłączając poprzednie, gdy sekwencja przebiega lub tańczy wzdłuż linii.
Ten ruch diod LED w górę / w dół reprezentuje prędkość pojazdu (lub poziom biegu), a wynik ten jest wykorzystywany przez parę tranzystorów do włączania świateł hamowania poprzez wykrywanie prędkości .
Jak to działa
Pomysł polega na tym, aby wykryć prędkość i włączyć światła hamowania tylko wtedy, gdy wykryje się, że prędkość zwalnia stosunkowo szybciej, i ignorowanie wolniejszych przejść lub opóźnionej zmiany biegów.
Jest to ważne, aby zapewnić, że światła stopu nie zapalają się przy normalnej zmianie biegu na niższy, której celem jest jedynie zmniejszenie prędkości, a nie zatrzymanie pojazdu w pobliżu miejsca docelowego.
Jest to realizowane przez inteligentne użycie dwóch pinów (dowolnie wybranych) i dwóch odpowiednich tranzystorów BC557 dołączonych z odpowiednimi pinoutami układu scalonego LM3915.
Ustawienie wstępne na pinie # 5 układu scalonego jest ustawione tak, że przy stosunkowo wyższych prędkościach i poziomach biegów ostatnia dioda LED w sekwencji na pinie # 10 jest włączana (aktywowana), co odpowiednio włącza podłączony prawy tranzystor BC557.
W tym czasie lewa strona BC557 pokazana jako podłączona do pinu # 15 jest wyłączona (ponieważ tylko pin # 10 jest WŁĄCZONY, reszta jest wyłączona), dlatego sterownik LED używający TIP122 jest również utrzymywany w stanie WYŁĄCZONY, a tym samym światła hamowania są również wyłączone.
Teraz, w przypadku, gdy pojazd, który mógłby być motocyklem, ma zostać zatrzymany przez kierowcę, a zatem jego prędkość jest stosunkowo szybko zmniejszona, powoduje to, że wyjście LM3915 sekwencjonuje proporcjonalnie wstecz i dotyka styku # 15.
Ponieważ można oczekiwać, że powyższe sekwencjonowanie będzie przebiegać szybciej, BC557 na pinie # 10 jest utrzymywany jako włączony przez swoją podstawową sieć RC, nawet gdy jego podstawowy wyzwalacz został przesunięty i sekwencjonowany na pinie # 15.
W tym momencie można oczekiwać, że zarówno BC557 zostanie WŁĄCZONY, jak i sterownik LED wraz ze światłami stopu są również WŁĄCZONE .... światła stopu świecą się teraz jasno przez chwilę, aż do wskazania pin # 10 BC557 jest w stanie utrzymać swój podstawowy poziom naładowania kondensatora do optymalnego punktu przełączania.
Poprzedni: Układy pinów IC 555, stabilne, monostabilne, bistabilne z zbadanymi formułami Dalej: Pinout LM35, arkusz danych, obwód aplikacji