Obwód, który umożliwia użytkownikowi liniowe sterowanie prędkością podłączonego silnika poprzez obracanie dołączonego potencjometru, nazywany jest obwodem regulatora prędkości silnika.
Przedstawiono tutaj 3 łatwe do zbudowania obwody regulatora prędkości dla silników prądu stałego, jeden wykorzystujący MOSFET IRF540, drugi wykorzystujący IC 555 i trzeci koncept z IC 556 z przetwarzaniem momentu obrotowego.
Projekt nr 1: Sterownik prędkości silnika prądu stałego oparty na technologii Mosfet
Bardzo fajny i łatwy obwód kontrolera prędkości silnika prądu stałego można zbudować przy użyciu tylko jednego mosfetu, rezystora i potencjometru, jak pokazano poniżej:

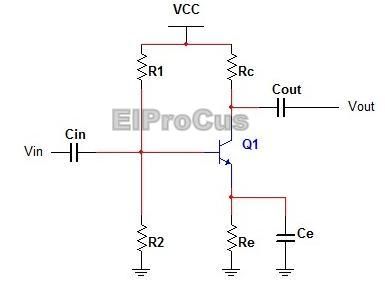
Korzystanie z nadajnika BJT

Jak widać, mosfet jest skonfigurowany jako obserwator źródła lub zwykły tryb drenażu, aby dowiedzieć się więcej o tej konfiguracji, możesz odnoszą się do tego postu , który omawia wersję BJT, niemniej zasada działania pozostaje ta sama.
W powyższej konstrukcji sterownika silnika prądu stałego, regulacja potencjometru tworzy zmienną różnicę potencjałów na bramce mosfetu, a pin źródłowy mosfetu po prostu podąża za wartością tej różnicy potencjałów i odpowiednio dostosowuje napięcie na silniku.
Oznacza to, że źródło zawsze będzie 4 lub 5 V opóźnione w stosunku do napięcia bramki i będzie zmieniać się w górę / w dół z tą różnicą, prezentując zmienne napięcie między 2 V a 7 V na silniku.
Gdy napięcie bramki wynosi około 7 V, pin źródła dostarczy minimum 2 V do silnika, powodując bardzo powolne obracanie silnika, a 7 V będzie dostępne na pinie źródła, gdy regulacja garnka generuje pełne 12 V na bramce mosfet.
Tutaj wyraźnie widać, że pin źródłowy mosfetu wydaje się podążać za bramką, a tym samym za zwolennikiem źródła nazwy.
Dzieje się tak, ponieważ różnica między bramką a pinem źródłowym mosfetu musi zawsze wynosić około 5 V, aby mosfet mógł optymalnie przewodzić.
W każdym razie powyższa konfiguracja pomaga wymusić płynną kontrolę prędkości na silniku, a projekt można zbudować dość tanio.
Zamiast mosfetu można również zastosować BJT, aw rzeczywistości BJT wytwarzałby wyższy zakres regulacji od około 1 V do 12 V w całym silniku.
Demo wideo
https://youtu.be/W762NTuQ19gJeśli chodzi o równomierne i wydajne sterowanie prędkością silnika, idealnym rozwiązaniem staje się sterownik PWM, tutaj dowiemy się więcej na temat prostego obwodu do realizacji tej operacji.
Projekt # 2: Sterowanie silnikiem DC PWM z IC 555
Projekt prostego regulatora prędkości silnika wykorzystującego PWM można rozumieć następująco:
Początkowo, gdy obwód jest zasilany, kołek wyzwalający znajduje się w logicznym położeniu niskim, ponieważ kondensator C1 nie jest naładowany.
Powyższe warunki inicjują cykl oscylacji, powodując zmianę sygnału wyjściowego na logiczny wysoki.
Wysoka moc wymusza teraz ładowanie kondensatora przez D2.
Po osiągnięciu poziomu napięcia, który jest 2/3 zasilania, pin # 6, który jest progiem wyzwalania układu scalonego.
W momencie wyzwolenia pin # 6, pin # 3 i pin # 7 powracają do stanu logicznego niskiego.
Gdy pin nr 3 jest niski, C1 ponownie zaczyna rozładowywać się przez D1, a kiedy napięcie na C1 spada poniżej poziomu, który stanowi 1/3 napięcia zasilania, pin # 3 i pin # 7 ponownie stają się wysokie, powodując kontynuację cyklu i powtarzaj dalej.
Warto zauważyć, że C1 ma dwie dyskretnie ustawione ścieżki procesu ładowania i rozładowania odpowiednio przez diody D1, D2 i ramiona oporowe ustawione przez garnek.
Oznacza to, że suma oporów napotkanych przez C1 podczas ładowania i rozładowywania pozostaje taka sama bez względu na ustawienie naczynia, dlatego długość fali wyjściowego impulsu zawsze pozostaje taka sama.
Jednakże, ponieważ okresy czasu ładowania lub rozładowania zależą od wartości oporu napotkanego na ich ścieżkach, naczynie dyskretnie ustawia te okresy czasu zgodnie z jego regulacjami.
Ponieważ okresy ładowania i rozładowania są bezpośrednio związane z cyklem roboczym wyjścia, zmienia się on w zależności od regulacji potencjometru, nadając kształt zamierzonym zmiennym impulsom PWM na wyjściu.
Średni wynik stosunku znacznik / odstęp daje wzrost mocy wyjściowej PWM, która z kolei steruje prędkością prądu stałego silnika.
Impulsy PWM są podawane do bramki mosfetu, który reaguje i steruje podłączonym prądem silnika w odpowiedzi na ustawienie potencjometru.
Poziom prądu płynącego przez silnik decyduje o jego prędkości, a tym samym realizuje efekt regulacji za pośrednictwem potencjometru.
Częstotliwość wyjścia z układu scalonego można obliczyć ze wzoru:
F = 1,44 (VR1 * C1)
Mosfet można wybrać zgodnie z wymaganiami lub prądem obciążenia.
Schemat obwodu proponowanego regulatora prędkości silnika prądu stałego można zobaczyć poniżej:

Prototyp:

Dowód testu wideo:
https://youtu.be/M-F7MWcSiFYW powyższym klipie wideo możemy zobaczyć, w jaki sposób konstrukcja oparta na IC 555 jest używana do sterowania prędkością silnika prądu stałego. Jak możesz być świadkiem, chociaż żarówka działa doskonale w odpowiedzi na PWM i zmienia swoją intensywność od minimalnego świecenia do maksymalnie niskiego, silnik nie.
Silnik początkowo nie reaguje na wąskie PWM, raczej zaczyna się szarpnięciem po ustawieniu PWM na znacznie większe szerokości impulsów.
Nie oznacza to, że obwód ma problemy, dzieje się tak dlatego, że zwora silnika prądu stałego jest ciasno trzymana pomiędzy parą magnesów. Aby zainicjować rozruch, twornik musi przeskoczyć swój obrót między dwoma biegunami magnesu, co nie może nastąpić przy powolnym i delikatnym ruchu. Musi rozpocząć się od pchnięcia.
Właśnie dlatego silnik początkowo wymaga większych regulacji PWM i po zainicjowaniu obrotu twornik zyskuje pewną energię kinetyczną, a teraz osiągnięcie niższej prędkości staje się możliwe dzięki węższym PWM.
Jednak mimo to osiągnięcie stanu wolniejszego ruchu obrotowego może być niemożliwe z tego samego powodu, co wyjaśniono powyżej.
Zrobiłem wszystko, co w mojej mocy, aby poprawić odpowiedź i osiągnąć najwolniejsze możliwe sterowanie PWM, wprowadzając kilka modyfikacji na pierwszym schemacie, jak pokazano poniżej:

Powiedziawszy to, silnik mógłby wykazywać lepszą kontrolę na wolniejszych poziomach, jeśli silnik jest przymocowany lub przymocowany obciążeniem przez koła zębate lub system kół pasowych.
Może się tak zdarzyć, ponieważ obciążenie będzie działać jak amortyzator i pomoże zapewnić kontrolowany ruch podczas regulacji wolniejszej prędkości.
Projekt nr 3: Wykorzystanie IC 556 do ulepszonej kontroli prędkości
Zmienna prędkość silnika prądu stałego może wydawać się, że nie jest to takie trudne i możesz znaleźć do tego wiele obwodów.
Jednak te obwody nie gwarantują stałych poziomów momentu obrotowego przy niższych prędkościach silnika, przez co ich działanie jest dość nieefektywne.
Ponadto przy bardzo niskich prędkościach z powodu niewystarczającego momentu obrotowego silnik ma tendencję do zgaśnięcia.
Inną poważną wadą jest to, że te obwody nie mają funkcji zmiany kierunku obrotów silnika.
Proponowany obwód jest całkowicie wolny od powyższych wad i jest w stanie generować i utrzymywać wysokie poziomy momentu obrotowego nawet przy najniższych możliwych prędkościach.
Działanie obwodu
Zanim omówimy proponowany obwód sterownika silnika PWM, chcielibyśmy również nauczyć się prostszej alternatywy, która nie jest tak wydajna. Niemniej jednak można go uznać za rozsądnie dobre, o ile obciążenie silnika nie jest duże i pod warunkiem, że prędkość nie zostanie zredukowana do poziomów minimalnych.
Rysunek pokazuje, jak pojedynczy układ scalony 556 może być użyty do sterowania prędkością podłączonego silnika, nie będziemy wchodzić w szczegóły, jedyną godną uwagi wadą tej konfiguracji jest to, że moment obrotowy jest wprost proporcjonalny do prędkości silnika.
Wracając do proponowanego projektu obwodu regulatora prędkości o wysokim momencie obrotowym, tutaj użyliśmy dwóch układów scalonych 555 zamiast jednego lub raczej pojedynczego układu IC 556, który zawiera dwa układy 555 w jednym pakiecie.
Schemat obwodu

Główne cechy
Krótko proponowane Sterownik silnika prądu stałego zawiera następujące interesujące funkcje:
Prędkość można zmieniać w sposób ciągły od zera do maksimum, bez przeciągania.
Poziomy prędkości nigdy nie wpływają na moment obrotowy i pozostaje stały nawet przy minimalnych poziomach prędkości.
Obroty silnika można odwrócić lub odwrócić w ułamku sekundy.
Prędkość jest zmienna w obu kierunkach obrotów silnika.
Dwójka 555 układów scalonych mają przypisane dwie oddzielne funkcje. Jedna sekcja jest skonfigurowana jako stabilny multiwibrator generujący zegary prostokątne 100 Hz, który jest podawany do poprzedniej sekcji 555 wewnątrz opakowania.
Powyższa częstotliwość jest odpowiedzialna za określenie częstotliwości PWM.
Tranzystor BC 557 jest używany jako źródło prądu stałego, które utrzymuje w stanie naładowania sąsiedni kondensator na ramieniu kolektora.
Powoduje to powstanie napięcia piłokształtnego na powyższym kondensatorze, które jest porównywane wewnątrz układu scalonego 556 z napięciem próbki przyłożonym zewnętrznie na pokazanym wyprowadzeniu.
Próbka napięcia przykładana zewnętrznie może być uzyskana z prostego obwodu zasilającego o zmiennym napięciu 0-12V.
To zmienne napięcie przyłożone do układu scalonego 556 jest wykorzystywane do zmiany PWM impulsów na wyjściu i ostatecznie jest wykorzystywane do regulacji prędkości podłączonego silnika.
Przełącznik S1 służy do natychmiastowej zmiany kierunku obrotów silnika, gdy jest to wymagane.
Lista części
- R1, R2, R6 = 1K,
- R3 = 150 K,
- R4, R5 = 150 omów,
- R7, R8, R9, R10 = 470 omów,
- C1 = 0,1 uF,
- C2, C3 = 0,01 uF,
- C4 = 1uF / 25VT1,
- T2 = TIP122,
- T3, T4 = TIP127
- T5 = BC557,
- T6, T7 = BC547,
- D1 --- D4 = 1N5408,
- Z1 = 4V7 400mW
- IC1 = 556,
- S1 = przełącznik dwustabilny SPDT
Powyższy obwód został zainspirowany następującym obwodem sterownika silnika, który został opublikowany dawno temu w magazynie elecktor electronic India.
Sterowanie momentem obrotowym silnika za pomocą IC 555

Pierwszy schemat sterowania silnikiem można znacznie uprościć, wykorzystując przełącznik DPDT do odwrócenia kierunku pracy silnika oraz tranzystor wtórny emitera do realizacji sterowania prędkością, jak pokazano poniżej:

Precyzyjne sterowanie silnikiem za pomocą pojedynczego wzmacniacza operacyjnego
Niezwykle wyrafinowana lub skomplikowana kontrola prądu stałego silnik można osiągnąć przy użyciu wzmacniacza operacyjnego i tacho-generatora. Wzmacniacz operacyjny jest skonfigurowany jako przełącznik wrażliwy na napięcie. W pokazanym poniżej obwodzie, gdy tylko wartość wyjściowa tacho-generatora spadnie poniżej zadanego napięcia odniesienia, następuje załączenie tranzystora przełączającego i doprowadzenie 100% mocy do silnika.
Przełączanie wzmacniacza operacyjnego następowałoby w ciągu zaledwie kilku miliwoltów wokół napięcia odniesienia. Będziesz potrzebował podwójnego zasilacza, który może być po prostu stabilizowany przez Zenera.

Ten kontroler silnika umożliwia płynną regulację zakresu bez angażowania jakichkolwiek mechanicznych kłopotów.
Wyjście wzmacniacza operacyjnego wynosi tylko +/- 10% poziomu szyn zasilających, dzięki czemu można sterować dużymi prędkościami silnika za pomocą wtórnika podwójnego emitera.
Napięcie odniesienia można było ustalić za pomocą termistorów lub LDR itp. Konfiguracja eksperymentalna wskazana na schemacie obwodu wykorzystywała wzmacniacz operacyjny RCA 3047A i silnik 0,25 W 6 V jako tacho-generator, który generował około 4 V przy 13000 obr./min. zamierzone informacje zwrotne.
Poprzedni: 3 najlepsze obwody złodzieja Joule Dalej: Obwód licznika gwizdka szybkowaru