
Jak sama nazwa wskazuje, artykuł ten ma na celu dokładne wyobrażenie o budowie i działaniu regulatora PID. Jednak wchodząc w szczegóły, pozwólmy sobie na wprowadzenie do regulatorów PID. Regulatory PID znajdują szerokie zastosowanie w sterowaniu procesami przemysłowymi. Około 95% operacji w pętli zamkniętej platformy automatyka przemysłowa sektor używa kontrolerów PID. PID to skrót od Proportional-Integral-Derivative. Te trzy kontrolery są połączone w taki sposób, że generują sygnał sterujący. Jako kontroler sprzężenia zwrotnego dostarcza wyjście sterujące na żądanych poziomach. Zanim wynaleziono mikroprocesory, sterowanie PID było realizowane przez analogowe komponenty elektroniczne. Ale dzisiaj wszystkie regulatory PID są przetwarzane przez mikroprocesory. Programowalne sterowniki logiczne mają również wbudowane instrukcje regulatora PID. Ze względu na elastyczność i niezawodność regulatorów PID, są one tradycyjnie używane w aplikacjach sterowania procesami.
Co to jest regulator PID?
Termin PID oznacza proporcjonalną pochodną całkową i jest to jeden rodzaj urządzenia używanego do sterowania różnymi zmiennymi procesowymi, takimi jak ciśnienie, przepływ, temperatura i prędkość w zastosowaniach przemysłowych. W tym sterowniku urządzenie sprzężenia zwrotnego pętli sterującej służy do regulacji wszystkich zmiennych procesowych.
Ten rodzaj sterowania służy do kierowania systemem w kierunku docelowej lokalizacji, w przeciwnym razie poziom. Jest prawie wszędzie do regulacji temperatury i jest używany w procesach naukowych, automatyzacji i niezliczonych substancjach chemicznych. W tym kontrolerze sprzężenie zwrotne w zamkniętej pętli jest używane do utrzymania rzeczywistego sygnału wyjściowego z metody zbliżonej do celu, w przeciwnym razie wyjście w punkcie ustalonym, jeśli to możliwe. W artykule omówiono konstrukcję regulatora PID z zastosowanymi w nich trybami sterowania, takimi jak P, I & D.
Historia
Historia regulatora PID to: W roku 1911 Elmer Sperry opracował pierwszy regulator PID. Następnie TIC (Taylor Instrumental Company) wdrożył dawny sterownik pneumatyczny z całkowicie przestrajalnym w roku 1933. Po kilku latach inżynierowie sterujący usunęli błąd stanu ustalonego, który występuje w regulatorach proporcjonalnych, poprzez ponowne ustawienie końca do fałszywej wartości, aż błąd nie będzie równy zeru.
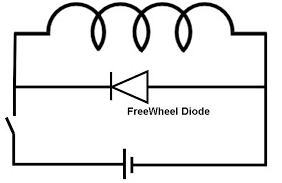
To przestrajanie obejmowało błąd, który jest znany jako regulator proporcjonalno-całkujący. Następnie, w roku 1940, pierwszy pneumatyczny regulator PID został opracowany w wyniku działania pochodnego w celu zmniejszenia problemów z przeregulowaniem.
W 1942 roku Ziegler & Nichols wprowadzili reguły strojenia, aby odkryć i ustawić przez inżynierów odpowiednie parametry regulatorów PID. W końcu automatyczne regulatory PID były szeroko stosowane w przemyśle w połowie 1950 roku.
Schemat blokowy regulatora PID
System z zamkniętą pętlą, taki jak regulator PID, zawiera układ sterowania ze sprzężeniem zwrotnym. Ten system ocenia zmienną sprzężenia zwrotnego za pomocą stałego punktu w celu wygenerowania sygnału błędu. Na tej podstawie zmienia moc wyjściową systemu. Ta procedura będzie kontynuowana, aż błąd osiągnie zero, w przeciwnym razie wartość zmiennej sprzężenia zwrotnego stanie się równa ustalonemu punktowi.
Ten regulator zapewnia dobre wyniki w porównaniu ze sterownikiem typu ON / OFF. W sterowniku typu WŁ. / WYŁ. Istnieją po prostu dwa warunki do zarządzania systemem. Gdy wartość procesu jest niższa niż ustalony punkt, wówczas zostanie włączony. Podobnie, wyłączy się, gdy wartość przekroczy ustaloną wartość. Sygnał wyjściowy nie jest stabilny w tego rodzaju regulatorze i będzie często wahał się w obszarze punktu stałego. Jednak ten kontroler jest bardziej stabilny i dokładny w porównaniu do kontrolera typu ON / OFF.

Działanie regulatora PID
Działanie regulatora PID
Przy zastosowaniu taniego, prostego regulatora ON-OFF, możliwe są tylko dwa stany regulacji, takie jak całkowite załączenie lub całkowite wyłączenie. Jest używany w ograniczonej aplikacji sterowania, w którym te dwa stany sterowania są wystarczające do celu sterowania. Jednak oscylacyjny charakter tego regulatora ogranicza jego zastosowanie i dlatego jest zastępowany regulatorami PID.
Regulator PID utrzymuje wyjście w taki sposób, że występuje zerowy błąd między zmienną procesową a wartością zadaną / żądaną mocą wyjściową przy pracy w pętli zamkniętej. PID wykorzystuje trzy podstawowe zachowania sterujące, które są wyjaśnione poniżej.
P- kontroler
Regulator proporcjonalny lub regulator P daje wyjście, które jest proporcjonalne do aktualnego błędu e (t). Porównuje żądaną lub zadaną wartość z rzeczywistą wartością lub wartością procesu sprzężenia zwrotnego. Wynikowy błąd jest mnożony przez stałą proporcjonalności, aby uzyskać wynik. Jeśli wartość błędu wynosi zero, to wyjście regulatora ma wartość zero.

Sterownik P.
Ten kontroler wymaga odchylenia lub ręcznego resetowania, gdy jest używany samodzielnie. Dzieje się tak, ponieważ nigdy nie osiąga stanu ustalonego. Zapewnia stabilną pracę, ale zawsze utrzymuje błąd stanu ustalonego. Szybkość odpowiedzi wzrasta, gdy proporcjonalna stała Kc wzrasta.

Odpowiedź kontrolera P.
I-Controller
Ze względu na ograniczenie regulatora p, w którym zawsze występuje przesunięcie między zmienną procesową a wartością zadaną, potrzebny jest regulator I, który zapewnia niezbędne działania w celu wyeliminowania błędu stanu ustalonego. Całkuje błąd w okresie czasu, aż wartość błędu osiągnie zero. Przechowuje wartość do końcowego urządzenia sterującego, przy którym błąd wynosi zero.

Regulator PI
Regulacja całkowa zmniejsza swoją moc wyjściową, gdy wystąpi błąd ujemny. Ogranicza szybkość reakcji i wpływa na stabilność systemu. Szybkość odpowiedzi zwiększa się poprzez zmniejszenie wzmocnienia całkowania Ki.

Odpowiedź kontrolera PI
Na powyższym rysunku, wraz ze spadkiem wzmocnienia regulatora I, maleje również błąd stanu ustalonego. W większości przypadków regulator PI jest używany szczególnie tam, gdzie nie jest wymagana szybka odpowiedź.
Podczas korzystania z regulatora PI, wyjście regulatora I jest ograniczone do pewnego zakresu, aby przezwyciężyć integralny nawijanie warunki, w których całkowite wyjście rośnie nawet przy zerowym stanie błędu, z powodu nieliniowości w instalacji.
D-Controller
I-kontroler nie ma możliwości przewidywania przyszłego zachowania się błędu. Dlatego reaguje normalnie po zmianie wartości zadanej. Kontroler D rozwiązuje ten problem, przewidując przyszłe zachowanie błędu. Jego wynik zależy od szybkości zmiany błędu w czasie pomnożonej przez stałą pochodną. Daje start dla wyjścia, zwiększając tym samym reakcję systemu.

Regulator PID
Na powyższym rysunku odpowiedź D oznacza, że regulator jest większy w porównaniu do regulatora PI, a także zmniejsza się czas ustalania wyjścia. Poprawia stabilność systemu poprzez kompensację opóźnienia fazowego spowodowanego przez kontroler I. Zwiększenie wzmocnienia pochodnego zwiększa szybkość odpowiedzi.

Odpowiedź sterownika PID
W końcu zauważyliśmy, że łącząc te trzy kontrolery, możemy uzyskać pożądaną odpowiedź dla systemu. Różni producenci projektują różne algorytmy PID.
Rodzaje regulatorów PID
Regulatory PID są podzielone na trzy typy, takie jak ON / OFF, proporcjonalne i standardowe. Kontrolery te są używane w oparciu o system sterowania, użytkownik może używać kontrolera do regulacji metody.
Sterowanie ON / OFF
Metoda sterowania załącz-wyłącz to najprostszy rodzaj urządzenia służącego do regulacji temperatury. Wyjście urządzenia może być włączone / wyłączone bez stanu środkowego. Ten sterownik włączy wyjście po prostu gdy temperatura przekroczy ustalony punkt. Regulator krańcowy to szczególny rodzaj kontrolera WŁ. / WYŁ., Który wykorzystuje przekaźnik zatrzaskowy. Ten przekaźnik jest resetowany ręcznie i używany do wyłączania metody po osiągnięciu określonej temperatury.
Sterowanie proporcjonalne
Ten rodzaj kontrolera jest przeznaczony do usuwania cykli, które są połączone przez sterowanie ON / OFF. Ten regulator PID zmniejszy normalną moc dostarczaną do grzejnika, gdy temperatura osiągnie ustalony punkt.
Ten sterownik ma jedną funkcję, która steruje grzałką tak, aby nie przekroczyła ustalonego punktu, ale osiągnie ustalony punkt, aby utrzymać stałą temperaturę.
Ten akt proporcjonalności można osiągnąć poprzez włączanie i wyłączanie wyjścia na krótkie okresy czasu. To dozowanie czasu zmieni stosunek czasu włączenia do czasu wyłączenia w celu kontrolowania temperatury.
Standardowy regulator PID
Ten rodzaj regulatora PID łączy sterowanie proporcjonalne ze sterowaniem całkującym i różniczkującym, aby automatycznie wspomagać urządzenie w kompensowaniu zmian w systemie. Te modyfikacje, całka i pochodna są wyrażone w jednostkach czasowych.
Te kontrolery są również odwoływane przez swoje wzajemności, odpowiednio RATE i RESET. Warunki PID muszą być dostosowane oddzielnie, w przeciwnym razie dostrojone do konkretnego systemu z próbą i błędem. Te kontrolery zapewniają najbardziej precyzyjną i stabilną kontrolę spośród 3 typów kontrolerów.
Sterowniki PID czasu rzeczywistego
Obecnie na rynku dostępne są różne rodzaje regulatorów PID. Sterowniki te są używane do wymagań przemysłowych, takich jak ciśnienie, temperatura, poziom i przepływ. Gdy te parametry są kontrolowane przez PID, wybór obejmuje wykorzystanie oddzielnego regulatora PID lub PLC.
Te oddzielne sterowniki są stosowane wszędzie tam, gdzie wymagana jest jedna, w przeciwnym razie, dwie pętle do sprawdzenia, a także w inny sposób kontrolowane w warunkach, w których jest to złożone z prawej strony wejścia przez większe systemy.
Te urządzenia sterujące zapewniają różne opcje sterowania w pętli solo i podwójnej. Samodzielne regulatory PID zapewniają kilka konfiguracji z punktami stałymi, aby generować kilka autonomicznych alarmów.
Te samodzielne sterowniki obejmują głównie regulatory PID firmy Honeywell, regulatory temperatury firmy Yokogawa, regulatory autotune firmy OMEGA, Siemens i sterowniki ABB.
Sterowniki PLC są używane jak sterowniki PID w większości przemysłowych aplikacji sterowania. Rozmieszczenie bloków PID można wykonać w sterownikach PAC lub PLC, aby zapewnić lepszy wybór dla dokładnego sterowania PLC. Te kontrolery są inteligentniejsze i wydajniejsze w porównaniu z oddzielnymi kontrolerami. Każdy sterownik PLC zawiera blok PID w oprogramowaniu.
Metody strojenia
Przed rozpoczęciem pracy regulatora PID należy go dostroić do dynamiki sterowanego procesu. Projektanci podają domyślne wartości dla terminów P, I i D, a te wartości nie mogą zapewnić pożądanej wydajności i czasami prowadzą do niestabilności i spowolnienia działania sterowania. Opracowano różne rodzaje metod strojenia w celu dostrojenia regulatorów PID i wymagają od operatora dużej uwagi, aby wybrać najlepsze wartości wzmocnień proporcjonalnych, całkowych i różniczkowych. Niektóre z nich podano poniżej.
Regulatory PID są używane w większości zastosowań przemysłowych, ale należy znać ustawienia tego regulatora, aby odpowiednio go wyregulować i wygenerować preferowane wyjście. Tutaj strojenie to nic innego jak procedura uzyskania idealnej odpowiedzi ze sterownika poprzez ustawienie najlepszych proporcjonalnych wzmocnień, całek i współczynników różniczkowania.
Żądane wyjście regulatora PID można uzyskać poprzez dostrojenie regulatora. Dostępne są różne techniki uzyskiwania wymaganych danych wyjściowych ze sterownika, takie jak metoda prób i błędów, krzywa reakcji Zeiglera-Nicholsa i reakcji procesu. Najczęściej stosowanymi metodami są próby i błędy, Zeigler-Nichols itp.
Metoda prób i błędów: Jest to prosta metoda strojenia regulatora PID. Podczas pracy systemu lub kontrolera możemy go dostroić. W tej metodzie najpierw musimy ustawić wartości Ki i Kd na zero i zwiększać człon proporcjonalności (Kp), aż układ osiągnie zachowanie oscylacyjne. Gdy oscyluje, wyreguluj Ki (człon całkujący) tak, aby oscylacje się zatrzymały, a na koniec dostosuj D, aby uzyskać szybką odpowiedź.
Technika krzywej reakcji procesu: Jest to technika strojenia w otwartej pętli. Generuje odpowiedź, gdy do systemu zostanie zastosowane wejście krokowe. Początkowo musimy ręcznie wprowadzić pewne wyjście sterujące do systemu i zarejestrować krzywą odpowiedzi.
Następnie musimy obliczyć nachylenie, czas martwy, czas narastania krzywej i na koniec podstawić te wartości do równań P, I i D, aby uzyskać wartości wzmocnienia składników PID.

Krzywa reakcji procesu
Metoda Zeiglera-Nicholsa: Zeigler-Nichols zaproponował metody pętli zamkniętej do strojenia regulatora PID. Są to metoda ciągłego cyklu i metoda drgań tłumionych. Procedury dla obu metod są takie same, ale zachowanie oscylacji jest inne. W tym celu najpierw musimy ustawić stałą regulatora p, Kp na określoną wartość, podczas gdy wartości Ki i Kd wynoszą zero. Wzmocnienie proporcjonalne jest zwiększane, aż system oscyluje ze stałą amplitudą.
Zysk, przy którym system wytwarza stałe oscylacje, nazywany jest wzmocnieniem końcowym (Ku), a okres oscylacji nazywany jest okresem ostatecznym (Pc). Po jego osiągnięciu możemy wprowadzić wartości P, I i D do regulatora PID według tabeli Zeiglera-Nicholsa w zależności od zastosowanego regulatora jak P, PI lub PID, jak pokazano poniżej.

Stół Zeigler-Nichols
Struktura regulatora PID
Regulator PID składa się z trzech członów, a mianowicie regulacji proporcjonalnej, całkującej i różniczkującej. Połączone działanie tych trzech kontrolerów daje strategię sterowania dla kontroli procesu. Regulator PID manipuluje zmiennymi procesowymi, takimi jak ciśnienie, prędkość, temperatura, przepływ itp. Niektóre aplikacje wykorzystują regulatory PID w sieciach kaskadowych, w których dwa lub więcej PID są używane do uzyskania regulacji.

Struktura regulatora PID
Powyższy rysunek przedstawia strukturę regulatora PID. Składa się z bloku PID, który przekazuje swoje dane wyjściowe do bloku procesu. Proces / instalacja składa się z końcowych urządzeń sterujących, takich jak siłowniki, zawory sterujące i inne urządzenia sterujące do sterowania różnymi procesami w przemyśle / zakładzie.
Sygnał sprzężenia zwrotnego z instalacji procesowej jest porównywany z wartością zadaną lub sygnałem odniesienia u (t), a odpowiedni sygnał błędu e (t) jest podawany do algorytmu PID. Zgodnie z obliczeniami sterowania proporcjonalnego, całkującego i różniczkującego w algorytmie, regulator wytwarza połączoną odpowiedź lub sterowany sygnał wyjściowy, który jest stosowany do urządzeń sterujących instalacją.
Wszystkie aplikacje sterujące nie potrzebują wszystkich trzech elementów sterujących. W praktycznych zastosowaniach bardzo często stosuje się takie kombinacje, jak sterowanie PI i PD.
Aplikacje
Zastosowania regulatora PID obejmują:
Najlepszą aplikacją regulatora PID jest regulacja temperatury, w której regulator wykorzystuje wejście czujnika temperatury, a jego wyjście można powiązać z elementem sterującym, takim jak wentylator lub grzejnik. Ogólnie rzecz biorąc, ten regulator jest po prostu jednym z elementów systemu kontroli temperatury. Przy wyborze odpowiedniego sterownika należy zbadać i wziąć pod uwagę cały system.
Kontrola temperatury pieca
Ogólnie rzecz biorąc, piece są używane do ogrzewania, a także do przechowywania ogromnych ilości surowca w wysokich temperaturach. Zwykle zajmowany materiał zawiera ogromną masę. W związku z tym wymaga dużej bezwładności, a temperatura materiału nie zmienia się gwałtownie, nawet gdy przykłada się duże ciepło. Ta cecha skutkuje umiarkowanie stabilnym sygnałem PV i umożliwia okresowi różniczkowania efektywną korektę błędu bez ekstremalnych zmian FCE lub CO.
Kontroler ładowania MPPT
Charakterystyka V-I ogniwa fotowoltaicznego zależy głównie od zakresu temperatury, a także nasłonecznienia. W zależności od warunków pogodowych prąd i napięcie robocze będą się stale zmieniać. Dlatego niezwykle istotne jest śledzenie najwyższego poziomu PowerPoint wydajnego systemu fotowoltaicznego. Regulator PID służy do znajdowania MPPT poprzez podawanie stałych punktów napięcia i prądu do sterownika PID. Po zmianie warunków pogodowych tracker utrzymuje stabilne natężenie i napięcie.
Przetwornik energoelektroniki
Wiemy, że przekształtnik jest aplikacją energoelektroniki, dlatego w przekształtnikach najczęściej stosuje się regulator PID. Ilekroć konwerter jest sprzymierzony przez system oparty na zmianie w obciążeniu, wyjście konwertera zostanie zmienione. Na przykład falownik jest powiązany z obciążeniem, a ogromny prąd jest dostarczany po zwiększeniu obciążenia. W związku z tym parametr napięcia i prądu nie jest stabilny, ale zmienia się w zależności od wymagań.
W tym stanie kontroler będzie generował sygnały PWM, aby aktywować tranzystory IGBT falownika. W oparciu o zmianę obciążenia, sygnał odpowiedzi jest dostarczany do regulatora PID, tak że wygeneruje n błędów. Sygnały te są generowane na podstawie sygnału błędu. W tym stanie możemy uzyskać zmienne wejście i wyjście za pomocą podobnego falownika.
Zastosowanie regulatora PID: Sterowanie w zamkniętej pętli dla bezszczotkowego silnika prądu stałego
Interfejs sterownika PID
Projekt i połączenie regulatora PID można wykonać za pomocą mikrokontrolera Arduino. W laboratorium sterownik PID oparty na Arduino jest projektowany z wykorzystaniem płytki Arduino UNO, elementów elektronicznych, chłodnicy termoelektrycznej, natomiast języki programowania oprogramowania wykorzystywane w tym systemie to C lub C ++. System ten służy do kontroli temperatury w laboratorium.
Parametry PID dla konkretnego regulatora można znaleźć fizycznie. Funkcja różnych parametrów PID może być realizowana poprzez późniejszy kontrast między różnymi formami regulatorów.
Ten system połączeń może skutecznie obliczyć temperaturę z błędem ± 0,6 ℃, podczas gdy stała temperatura regulowana jest po prostu dzięki niewielkiej różnicy w stosunku do preferowanej wartości. Koncepcje zastosowane w tym systemie zapewnią niedrogie i dokładne techniki zarządzania parametrami fizycznymi w preferowanym zakresie w laboratorium.
Dlatego w tym artykule omówiono przegląd regulatora PID, który obejmuje historię, schemat blokowy, strukturę, typy, działanie, metody strojenia, interfejsy, zalety i zastosowania. Mamy nadzieję, że udało nam się przekazać podstawową, ale precyzyjną wiedzę na temat regulatorów PID. Oto proste pytanie do was wszystkich. Spośród różnych metod strojenia, która metoda jest preferowana, aby uzyskać optymalne działanie regulatora PID i dlaczego?
Prosimy o udzielenie odpowiedzi w sekcji komentarzy poniżej.
Kredyty fotograficzne
Schemat blokowy regulatora PID wg wikimedia
Struktura regulatora PID, regulator P, P - odpowiedź regulatora i regulator PID wg blog.opticontrols
P - odpowiedź kontrolera wg controls.engin.umich
PI- odpowiedź regulatora wg m. jeść
Odpowiedź regulatora PID wg wikimedia
Tabela Zeigler-Nichols wg controls.engin






{kind=link}
{kind=link}
{kind=link}
{kind=link}