Chociaż obwody zdalnego sterowania quadkoptera można bardzo łatwo kupić na rynku lub w dowolnym sklepie internetowym, zapalony hobbysta nigdy nie może dowiedzieć się, jak właściwie te funkcje działają i czy można je zbudować w domu?
W tym artykule postaramy się zbudować prosty obwód zdalnego sterowania quadkoptera przy użyciu komponentów dyskretnych i modułów zdalnego sterowania RF, bez angażowania skomplikowanych obwodów opartych na MCU.
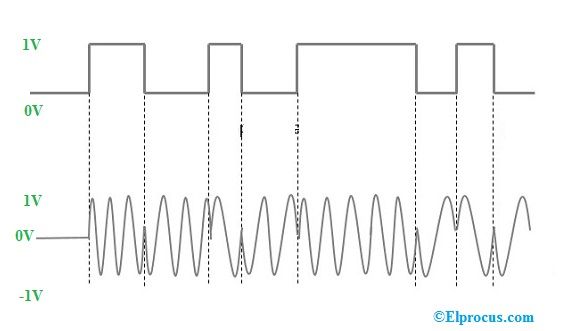
Przewodnik krok po kroku pomoże zainteresowanym hobbystom zrozumieć, jak łatwo można sterować quadkopterem za pomocą koncepcji PWM.
Dowiedzieliśmy się już podstawy quadkoptera , teraz zbadajmy sekcję zdalnego sterowania, która ostatecznie pomoże w zdalnym sterowaniu urządzeniem.
Wymagane moduły podstawowe
Główne składniki, które mogą być wymagane w projekcie, podano poniżej:
Zasadniczo będziemy wymagać następujących 3 etapów obwodu:
1) 4-drożne moduły zdalnego sterowania RF Tx, Rx - 1 zestaw
2) Obwody generatora PWM oparte na IC 555 - 4nos
3) Obwody sterownika silnika BLDC - 4nasz
Ponieważ jest to wersja domowa, możemy spodziewać się pewnych nieefektywności w proponowanym projekcie, takich jak brak joysticków do elementów sterujących, które są zastąpione potencjometrami lub potencjometrami, niemniej jednak można oczekiwać, że zdolność robocza systemu będzie porównywalna z jednostki zawodowe.
Ręczny nadajnik PWM będzie zasadniczo składał się ze zdalnego modułu Tx zintegrowanego z 4 dyskretnymi obwodami sterującymi PWM, podczas gdy quadkopter będzie musiał być zamknięty w 1 obwodzie Rx zintegrowanym z 4 dyskretnymi obwodami sterownika BLDC.
Zacznijmy od obwodów silnika quadkoptera i zobaczmy, jak należy skonfigurować i podłączyć sterownik silnika BLDC do obwodu Rx.
Obwód odbiornika PWM Quadcoptera
W jednym z poprzednich postów dowiedzieliśmy się, jak można zbudować uniwersalny sterownik silnika BLDC przy użyciu pojedynczego chipa, jednak ten projekt nie jest przeznaczony do obsługi stosunkowo cięższych silników quadkoptera, dlatego może nie nadawać się do obecnego zastosowania.
Na szczęście dostępna jest opcja „starszego brata” dla powyższego toru, która doskonale nadaje się do napędzania silników quadkopterów. Dziękujemy firmie TEXAS INSTRUMENTS za dostarczenie nam tak wspaniałej aplikacji jednoukładowej określonych modułów obwodów.
Aby dowiedzieć się więcej na temat tego wysokoprądowego układu scalonego sterownika BLDC, możesz zapoznać się z następującym arkuszem danych PDF tego samego
https://homemade-circuits.com/wp-content/uploads/2015/10/slwu083a.pdf
Poniższa konfiguracja przedstawia pełny schemat obwodu sterownika silnika quadkoptera wykorzystującego układ DRV11873, który jest niezależnym, niskoprądowym obwodem silnika BLDC, składającym się ze wszystkich wymaganych funkcji zabezpieczających, takich jak ochrona przed przeciążeniem, ochrona termiczna itp. Ten moduł zasadniczo tworzy ESC dla naszej obecnej jednostki quadkoptera.
Więcej informacji na temat tego projektu i szczegółów PCB można znaleźć w oryginalnym dokumencie poniżej:
http://www.ti.com/lit/ds/symlink/drv11873.pdf

Jak to działa
Wyprowadzenia FS i FG układu scalonego służą do ulepszenia układu scalonego za pomocą dodatkowych elementów sterujących przez obwody zewnętrzne, ponieważ nie używamy tych funkcji w naszym projekcie, piny te mogą być nieużywane i zaterminowane do linii dodatniej przez rezystor 100K.
Pinout RD układu scalonego decyduje o kierunku obrotów silnika. Podłączenie tego pinu do Vcc przez rezystor 100K umożliwia obrót silnika w kierunku przeciwnym do ruchu wskazówek zegara, a pozostawienie go niepodłączonego działa odwrotnie i umożliwia obracanie się silnika w kierunku zgodnym z ruchem wskazówek zegara.
Pin # 16 to wejście PWM używane do wprowadzenia sygnału wejściowego PWM z zewnętrznego źródła, zmiana cyklu pracy PWM odpowiednio zmienia prędkość silnika.
Wyprowadzenia FR, CS są również nieistotne dla potrzeb i dlatego mogą być nieużywane, jak pokazano na schemacie, i zaterminowane do linii dodatniej przez rezystor 100K.
Wyprowadzenia U, V, W to wyjścia silnika, które należy połączyć z odpowiednim trójfazowym silnikiem quadkoptera BLDC.
Pinout COM służy do podłączenia wspólnego przewodu silnika 3-fazowego, jeśli twój silnik nie ma wspólnego przewodu, możesz go po prostu zasymulować, podłączając 3 numery rezystorów 2k2 do pinów U, W, W, a następnie połączyć ich wspólne kończy się pinem COM układu scalonego.
Schemat przedstawia również układ IC 555 skonfigurowany w trybie obwodu astabilnego PWM. Staje się częścią modułu obwodu, a wyjście PWM z jego pinu # 7 można zobaczyć połączone z wejściem PWM obwodu DRV IC w celu zainicjowania 4 silników ze stałą prędkością podstawową i umożliwienia silnikowi stałego zawisu prędkość w danym miejscu.
Na tym kończy się główny obwód ELC lub obwód sterownika BLDC dla naszego projektu quadkoptera.
Będziemy potrzebować czterech takich modułów dla czterech silników w naszym projekcie quadkoptera.
Oznacza to, że 4 takie układy scalone DRV wraz ze stopniem IC 555 PWM będą musiały być skojarzone z każdym z 4 silników quadkoptera.
Moduły te zapewniają, że normalnie wszystkie 4 silniki są ustawione na z góry określoną prędkość poprzez zastosowanie stałego i identycznego sygnału PWM do każdego z odpowiednich układów scalonych sterownika DRV.
Teraz nauczmy się, jak można zmieniać PWM za pomocą pilota w celu zmiany prędkości poszczególnych silników za pomocą zwykłego 4-kanałowego pilota zdalnego sterowania.
Moduł odbiornika RF (dekoder PWM)

Powyższy obwód przedstawia zdalny obwód RF odbiornika, który ma być umieszczony wewnątrz quadkoptera do odbierania zewnętrznych bezprzewodowych danych PWM z pilota zdalnego sterowania użytkownika, a następnie odpowiednio przetwarza sygnały w celu zasilania towarzyszących modułów kontrolera DRV, jak wyjaśniono w Poprzednia sekcja.
4 wyjścia nazwane PWM # 1… .PWM # 4 należy połączyć ze stykiem PWM # 15 układu DRV IC, jak pokazano na poprzednim schemacie.
Te styki PWM z modułu odbiornika RF są aktywowane po naciśnięciu odpowiedniego przycisku przez użytkownika w pilocie nadajnika.
Jak nadajnik RF musi być okablowany (koder PWM)
W powyższej sekcji omówiliśmy obwód Rx lub zdalnego odbiornika i sposób, w jaki jego 4 wyjścia muszą być połączone z modułami sterownika ESC silnika quadkoptera.
Tutaj widzimy, jak prosty nadajnik RF musi zostać utworzony i podłączony do obwodów PWM do bezprzewodowego przesyłania danych PWM do odbiornika quadkoptera, tak aby prędkości poszczególnych silników były kontrolowane po prostu przez naciśnięcie przycisku, co ostatecznie powoduje quadkopter do zmiany kierunku lub prędkości, zgodnie z preferencjami użytkownika.

Schemat pokazany powyżej przedstawia szczegóły okablowania modułu nadajnika. Pomysł wygląda dość prosto, główny obwód nadajnika jest utworzony przez układ TSW434, który przesyła zakodowane sygnały PWM do atmosfery, oraz HT12E, który staje się odpowiedzialny za podawanie zakodowanych sygnałów do układu TSW.
Sygnały PWM są generowane przez 4 oddzielne stopnie obwodu IC 555, które mogą być identyczne z tym, który został wcześniej omówiony w module sterownika DRV.
Zawartość PWM 4 układów scalonych można zobaczyć zakończoną do odpowiednich styków układu scalonego enkodera HT12E za pomocą 4 dyskretnych przycisków oznaczonych jako SW1 ---- SW4.
Każdy z tych przycisków odpowiada i przełącza identyczne wyprowadzenia modułu odbiornika, o którym mówiliśmy wcześniej i oznaczono jako PWM # 1, PWM # 2… ..PWM # 4.
Oznacza to, że naciśnięcie SW1 może spowodować, że wyjście PWM # 1 odbiornika będzie aktywne, a to spowoduje, że pinout rozpocznie przesyłanie odebranych zdekodowanych sygnałów PWM z nadajnika do skojarzonego modułu DRV i z kolei spowoduje odpowiednią zmianę prędkości odpowiedniego silnika.
Podobnie, naciśnięcie SW2,3,4 może być użyte do wpływania na prędkości pozostałych 3 silników quadkoptera zgodnie z życzeniem użytkownika.
Obwód IC 555 PWM
4 obwody PWM pokazane na powyższym pilocie nadajnika RF można zbudować, odwołując się do poniższego schematu, który jest dokładnie podobny do tego, który widzieliśmy w obwodzie ESC kontrolera DRV.

Proszę pamiętać, że potencjometr 5K może mieć postać zwykłego potencjometru i można go dodatkowo używać z przyciskami do wyboru różnych prędkości na odpowiednich silnikach.
Oznacza to, że trzymając wciśnięty wybrany przycisk i jednocześnie przesuwając odpowiedni 5KPWMpot można spowodować zwiększenie lub zmniejszenie prędkości quadkoptera w przewidzianym kierunku.
Alternatywnie PWM można początkowo ustawić na wyższym lub niższym poziomie, a następnie nacisnąć odpowiedni przycisk, aby umożliwić odpowiedniemu silnikowi quadkoptera osiągnięcie preferowanej prędkości, zgodnie z ustawieniem PWM.
Specyfikacja silnika quadkoptera
Wyjaśniony powyżej obwód zdalnego sterowania Qiadcopter jest przeznaczony wyłącznie do wyświetlania i nie może być używany do podnoszenia ładunków lub kamery. Oznacza to, że silniki zastosowane w projekcie powinny być najlepiej typu niskoprądowego.
Układ scalony DRV11873 jest przeznaczony do zasilania silników o napięciu 15 V, 1,5 A lub około 20 W, więc do tego celu można użyć dowolnego 3-fazowego silnika BLDC o mocy od 15 do 30 watów.
Akumulator dla tej konstrukcji quadkoptera może być dowolnym akumulatorem litowo-jonowym 12 V Lipo pr, który może zapewnić szczyt 15 V przy ciągłym prądzie 1,5 A.
Szczegóły specyfikacji
1306N Bezszczotkowy miniaturowy silnik prądu stałego Outrunner
Typ: mikro silnik
Konstrukcja: magnes trwały
Komutacja: bezszczotkowa
Prędkość (RPM): 2200 obr / min / v
Ciągły prąd (a): 1,5 ~ 2,6A
Napięcie (V): 7,4 ~ 11,1 V.
miniaturowy silnik prądu stałego: AX-1306N
waga: 8g
średnica wału: 1,5 mm
Bateria LI-PO: 2-3 s
prąd roboczy: 1,5 ~ 2,6A
maksymalna wydajność: 67%

Poprzedni: Bezczujnikowy obwód sterownika silnika BLDC Dalej: Obwód sterownika nagrzewnicy za pomocą przycisków