W poście wyjaśniono prosty obwód sterownika silnika sterowanego laserem liniowym, który reaguje na precyzyjną poziomą linię laserową, generowaną z poziomu lasera liniowego i automatycznie dostosowuje wyrównanie podłączonego narzędzia lub pracy z ekstremalną perfekcją i dokładnością.
Co to jest laser liniowy
Laser liniowy to precyzyjny elektroniczny zamiennik starej poziomicy stolarzy.
Liniowe urządzenie laserowe jest w rzeczywistości zaawansowanym urządzeniem emitującym promieniowanie laserowe, które może generować 360 ° wysoce precyzyjna, podświetlana pozioma linia laserowa, zapewniająca kalibracyjne odniesienie do wszystkich prac inżynieryjnych w przemyśle lub budownictwie, dzięki czemu wynik końcowy pracy jest idealnie prosty i wyrównany bez najmniejszego najmniejszego błędu.
Obwód został zamówiony przez jednego z oddanych czytelników tego bloga, pana Rafała.
Szczegółowe omówienie procedury pracy silnika sterowanego laserem liniowym można znaleźć w poniższych punktach:
Cel projektu
Pan. Rafal: Jestem w tym bardzo nowy. W ciągu ostatnich kilku tygodni przeprowadziłem pewne badania i nie znalazłem dokładnie tego, czego potrzebuję.
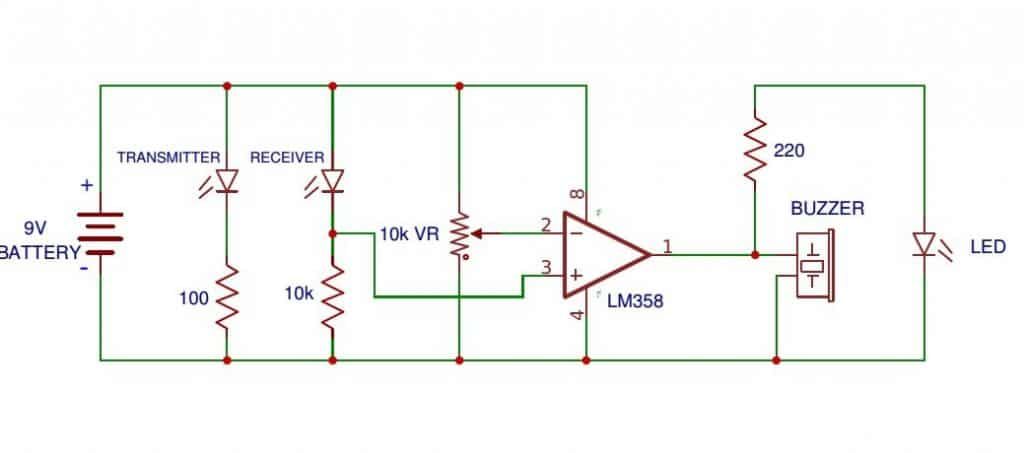
Będę wdzięczny za każdą pomoc. Załączam zdjęcie mojego pomysłu. Chcę sterować dwoma silnikami 12 V DC z poziomicą laserową.
Poziom lasera liniowego będzie sygnalizował odbiorniki.

Sygnał ten będzie następnie musiał sterować kierunkiem silnika 12 V DC. Silnik obraca gwintowany pręt do przodu i do tyłu, aby wyregulować wysokość narzędzia.
Z tego, co odkryłem, byłoby kilka fotodiod połączonych równolegle, jedna ustawiona do wykrywania lasera powyżej zera, a druga poniżej tego poziomu. Poziom zerowy to po prostu rodzaj przerwy między fotodiodami, która zapobiega wybudzaniu systemu. Czujnik laserowy bez wyświetlacza. Dałem tylko zdjęcie poglądowe.
Potrzebuję obwodu mostka H, ale wszystkie znalezione przeze mnie mają być używane z systemem Arduino. W razie potrzeby mogę kupić gotowy most za rozsądną cenę do 30 USD
Idealnie działałoby to zarówno z czerwonymi, jak i zielonymi laserami, ale długości fal są tak różne, że wątpię, aby można to zrobić i nie działałoby to w całym spektrum światła.
Początkowo chciałbym ustawić poziom tej belki mocowanej do silników przyciskami góra-dół. Byłbym zachwycony, gdyby drugi silnik zrównał się z żyroskopem podczas jego ustawiania, ale bez Arduino może to być bardzo trudne.
Czuję, że to, co próbuję zrobić, jest tak proste, że mogę uciec bez używania Arduino. A ja upieram się na analog, ze względu na trudne warunki na budowie i wydaje mi się, że im więcej elektroniki, tym bardziej zawodne urządzenie.
Będzie działać tylko w pomieszczeniach, a odległość lasera to maksymalnie 10m. Silnik, który znalazłem na początku ma duży pobór prądu 200mA max 2,19 A, ale również duży moment obrotowy.
Zasilanie 18 V DC z baterii Makita.
Z góry dziękuję za wszelkie sugestie.
Pozdrowienia z Polski
Rafał
Łup : Mam zamieszanie co do działania wałów silnika. Gwintowana śruba na obu silnikach popchnie narzędzie, ale nie może go odciągnąć? Jak to działa?
Czy można zrealizować to samo z jednym silnikiem?
Pan. Rafał: Niższe prostownice poziomujące miałyby być może 70 cm, tylko dla małych pomieszczeń, np. toaleta, aby można było wejść przez drzwi.
Maszyna bez napędu, ręcznie ciągnięta, tylko prostownice prostujące. Na filmie dwa żółte obiekty na masztach to detektory laserowe sztywno przymocowane do liniałów.
Laser stoi gdzieś dalej i wytwarza poziomą linię.
Silniki byłyby przymocowane do wózka, a gwintowana śruba do prostownic poziomujących z detektorami laserowymi. Aby wypoziomować obie strony, muszą być dwa silniki, ale jest to odbicie lustrzane.
Jedyną wspólną częścią byłby dwukanałowy mostek H jakbym to robił z gotowego modułu i ewentualnie żyroskopu, ale to marzenie :).
Ważne jest, aby był przycisk do obrotów lewego i prawego silnika.
Procedura jest taka. Wieszam laser np. 2 m nad wyznaczonym poziomem podłogi. Odmierzam 2 metry od wiązki lasera do dolnej krawędzi prostownic.
Reguluję wysokość naciskając przyciski przełączników prawo-lewo tak, aby była równa 2 metry do dolnej krawędzi prostownic. Detektory ustawiam na masztach tak, aby wiązka lasera znajdowała się na poziomie zerowym pomiędzy sekcjami fotodiody. A reszta zrobi się sama
W załączniku umieściłem rysunek przedstawiający działanie czujnika.
Rafał
Projekt obwodu

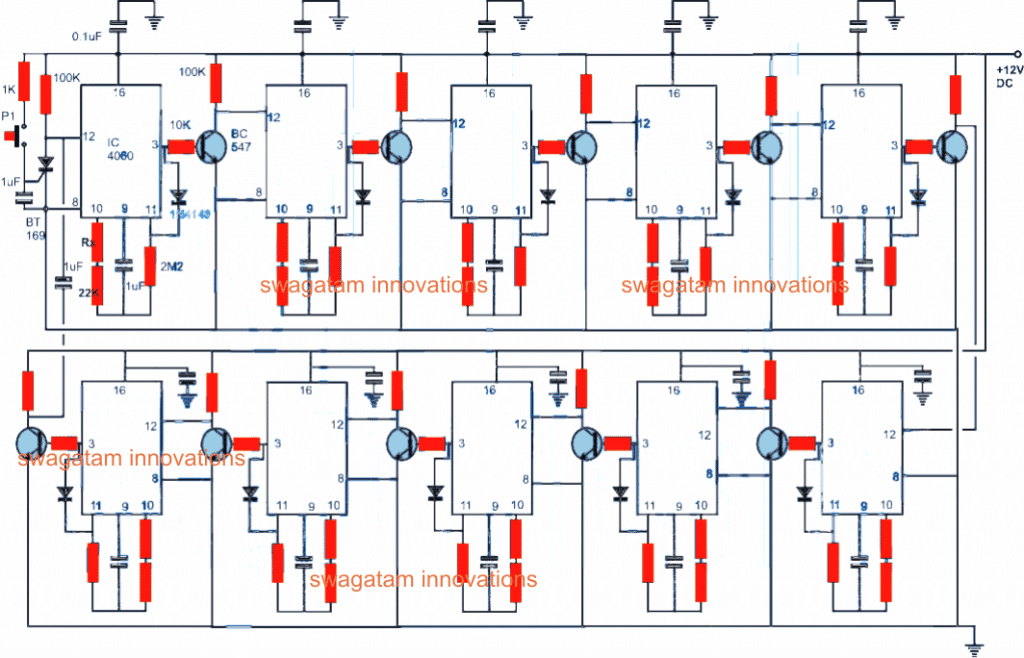
Patrząc na powyższy rysunek, dwa takie identyczne stopnie obwodu będą wymagane do wykrywania i korygowania powiązanego narzędzia sterowanego silnikiem pod względem dokładności prostoliniowości linii lasera.
Dwa identyczne etapy są lustrzanymi odbiciami, jak pokazano poniżej:

Obwód jest dość prosty. Działa z komparatorem okienkowym, który zapewnia, że silniki napędowe nie działają, o ile para LDR jest naświetlona z identyczną jasnością linii lasera.
Następnie na nieodwracającym wejściu A1 i na odwracającym wejściu A2 generowane jest połowę napięcia zasilania.
Gdy tylko zostanie wykryte odchylenie linii lasera (co może się zdarzyć, jeśli narzędzie sterowane silnikiem nie jest ustawione prosto), zmienia się jasność wpływająca na LDR R1 i R2.
W tej sytuacji napięcie wejściowe do komparatora okienkowego oddala się od połowy napięcia zasilania. Sytuacja ta powoduje, że wyjście komparatora wysyła do sieci mostka silnika polecenie ruchu silnika w kierunku zgodnym lub przeciwnym do ruchu wskazówek zegara.
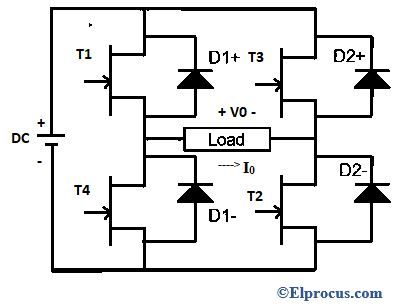
Tranzystory T1. . . T4 są skonfigurowane jak sieć mostów, aby umożliwić włączanie silnika kierunki do przodu i do tyłu w zależności od oświetlenia LDR lub kąta odchylenia linii lasera.
Diody D1. . . D4 są ustawione tak, aby niwelować piki napięcia generowane w czasie, gdy silnik jest aktywny i pracuje. Zadaniem potencjometrów Preset P1 i P2 jest ułatwienie regulacji wyrównania.
Są one precyzyjnie dostrojone, aby zapewnić, że silnik jest całkowicie wyłączony i nieaktywny, o ile odpowiednia para LDR jest wystawiona na dokładnie taką samą jasność światła lasera.
Powiedzmy na przykład, że z powodu nieprawidłowego ustawienia narzędzia sterowanego silnikiem nachylenie linii lasera powoduje zmniejszenie światła na LDR R2 niż LDR R1. Spowoduje to wzrost napięcia w punkcie A powyżej połowy napięcia zasilania.
W tej sytuacji wyjście wzmacniacza operacyjnego A1 staje się wysokie, zmuszając tranzystory T1 i T4 do działania. To z kolei powoduje, że silnik obraca się w odpowiednim kierunku. Ta czynność automatycznie przesuwa podłączone narzędzie w linii prostej, aż dokładność ustawienia w poziomie pokrywa się z dokładnością linii lasera.
I odwrotnie, jeśli przyjmiemy, że narzędzie jest przechylane z odwrotną orientacją, tak że oświetlenie LDRów jest przeciwne do omówionego powyżej, powoduje, że napięcie w punkcie A spada poniżej połowy napięcia zasilania. Ten stan powoduje, że wzmacniacz operacyjny wyjścia A2 przechodzi w stan wysoki, tak że T3 i T2 zaczynają działać.
Powoduje to, że silnik pracuje teraz w przeciwnym kierunku, próbując skorygować ustawienie narzędzia w odpowiednim kierunku, aż stanie się idealnie proste, zgodnie z dokładnością poziomą linii lasera.
Przycisk w górę / w dół
Przyciski góra dół służące do wstępnego ustawienia wysokości poziomnicy można w prosty sposób zaimplementować, podłączając równolegle przełączniki przyciskowe do każdego z LDR.
Instalacja LDR
Aby uzyskać prawidłową odpowiedź z LDR, lewe prawe pary muszą być zainstalowane wewnątrz obudowy podobnej do tuby, tak aby mogły „widzieć” tylko oświetlenie laserowe, a nie jakiekolwiek inne światło otoczenia.
Pomysł można zobaczyć na poniższym obrazku:

Tutaj widzimy, że LDR są umieszczone bardzo blisko siebie, co zapewnia, że gdy linia lasera znajduje się dokładnie w środku, część obu par LDR jest równomiernie oświetlana przez światło lasera.
Przód obudowy LDR może być pokryty rozproszoną soczewką, tak aby światło lasera mogło być równomiernie rozproszone wewnątrz odpowiednich LDR.
Poprzedni: Prosty obwód alarmowy zabezpieczający przed kradzieżą do ochrony cennych przedmiotów Dalej: Uniwersalny obwód testera BJT, JFET, MOSFET