Obwód, który umożliwia podłączonemu silnikowi pracę w kierunku zgodnym i przeciwnym do ruchu wskazówek zegara poprzez naprzemienne wyzwalacze wejściowe, nazywany jest dwukierunkowym obwodem sterownika.
Pierwszy projekt poniżej omawia dwukierunkowy obwód sterownika silnika oparty na pełnym mostku lub mostku H, wykorzystujący 4 wzmacniacze operacyjne z układu scalonego LM324. W drugim artykule dowiadujemy się o obwodzie dwukierunkowego sterownika silnika o wysokim momencie obrotowym wykorzystującym układ IC 556
Wprowadzenie
Ogólnie, przełączniki mechaniczne są przyzwyczajeni do regulacji kierunku obrotów silnika prądu stałego. Regulacja polaryzacji używanego napięcia i silnik obraca się w przeciwnym kierunku!
Z jednej strony może to mieć tę wadę, że wymaga dodania przełącznika DPDT w celu zmiany polaryzacji napięcia, ale mamy do czynienia tylko z przełącznikiem, który sprawia, że procedura jest dość łatwa.
Jednak DPDT może mieć jeden poważny problem, nie zaleca się gwałtownego odwracania napięcia na silniku prądu stałego podczas jego ruchu obrotowego. Może to spowodować skok prądu, który może spowodować spalenie odpowiedniego regulatora prędkości.
Co więcej, każdy rodzaj obciążenia mechanicznego może również powodować podobne problemy. Ten obwód z łatwością pokonuje te komplikacje. Kierunkiem i prędkością manipuluje się za pomocą pojedynczego potencjometru. Obracanie naczynia w określonym kierunku powoduje, że silnik zaczyna się obracać.
Przełączenie garnka w przeciwnym kierunku umożliwia obracanie się silnika w ruchu wstecznym. Środkowe położenie naczynia wyłącza silnik, zapewniając, że najpierw zwalnia, a następnie zatrzymuje się, zanim zostanie podjęta próba zmiany kierunku.
Specyfikacja techniczna
Napięcie: Obwód i silnik korzystają ze wspólnego źródła zasilania. Oznacza to, że ponieważ najwyższe napięcie robocze LM324 wynosi 32 VDC, to również staje się maksymalnym napięciem dostępnym do działania silnika.
Obecny: MOSFET IRFZ44 jest zaprojektowany dla 49A, a IRF4905 będzie w stanie obsłużyć 74A. Niemniej jednak ścieżki PCB, które biegną od pinów MOSFET do zacisków śrubowych, mogą obsługiwać tylko około 5A. Można to poprawić, lutując kawałki drutu miedzianego na ścieżkach PCB.
W takim przypadku upewnij się, że tranzystory MOSFET nie nagrzewają się zbytnio - jeśli tak się stanie, konieczne będzie zamontowanie na tych urządzeniach większych radiatorów.
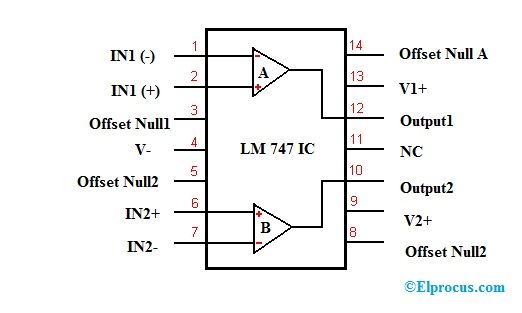
Pinouty LM324

DWUKIERUNKOWE STEROWANIE SILNIKAMI PRĄDU STAŁEGO ZA POMOCĄ LM324
Zasadniczo znajdziesz 3 sposoby wyregulować prędkość silników prądu stałego :
1. Używając zmechanizowanych kół zębatych, aby uzyskać idealne przyspieszenie: Takie podejście często wykracza poza wygodę większości entuzjastów ćwiczących w domowych warsztatach.
dwa. Zmniejszenie napięcia silnika przez rezystor szeregowy. Może to być z pewnością nieefektywne (moc zostanie rozproszona w rezystorze), a także spowoduje zmniejszenie momentu obrotowego.
Prąd pobierany przez silnik również rośnie wraz ze wzrostem obciążenia silnika. Zwiększony prąd oznacza większy spadek napięcia na rezystorze szeregowym, a tym samym spadek napięcia dla silnika.
Następnie silnik podejmuje wysiłek, aby pociągnąć jeszcze większą ilość prądu, powodując jego zgaśnięcie.
3. Podając całe napięcie zasilania do silnika w krótkich impulsach: Ta metoda eliminuje efekt upuszczania serii. Nazywa się to modulacją szerokości impulsu (PWM) i jest strategią zastosowaną w tym obwodzie. Szybkie impulsy pozwalają silnikowi pracować powoli. Wydłużone impulsy pozwalają silnikowi pracować szybciej.

JAK TO FUNKCJE (patrz schemat)
Obwód można podzielić na cztery etapy:
1. Sterowanie silnikiem - IC1: A
2. Generator fal trójkątnych - IC1: B
3. Komparatory napięcia - IC1: C i D
4. Napęd silnikowy - Q3-6
Zacznijmy od etapu sterownika silnika, skupionego wokół tranzystorów MOSFET Q3-6. Tylko kilka z tych tranzystorów MOSFET pozostaje w stanie aktywnym w dowolnym momencie. Gdy Q3 i Q6 są włączone, prąd przepływa przez silnik i powoduje jego obrót w jednym kierunku.
Gdy tylko Q4 i Q5 są w stanie roboczym, obieg prądu jest odwrócony i silnik zaczyna się obracać w przeciwnym kierunku. IC1: C i IC1: D zajmują się tym, które tranzystory MOSFET są włączone.
Opampy IC1: C i IC1: D są podłączone jako komparatory napięcia. Napięcie odniesienia dla tych wzmacniaczy operacyjnych jest wytwarzane przez dzielnik napięcia rezystora R6, R7 i R8.
Zauważ, że napięcie odniesienia dla IC1: D jest dołączone do wejścia „+”, ale dla IC1: C jest dołączone do wejścia „-”.
Oznacza to, że IC1: D jest aktywowany napięciem wyższym niż jego odniesienie, podczas gdy IC1: C jest monitowany napięciem niższym niż jego odniesienie. Opamp IC1: B jest skonfigurowany jako generator fali trójkątnej i dostarcza sygnał aktywacyjny do odpowiednich komparatorów napięcia.
Częstotliwość jest z grubsza odwrotnością stałej czasowej R5 i C1 - 270 Hz dla zastosowanych wartości.
Zmniejszenie wartości R5 lub C1 powoduje zwiększenie częstotliwości, zwiększenie któregokolwiek z nich spowoduje zmniejszenie częstotliwości. Szczytowy poziom wyjściowy fali trójkątnej jest znacznie mniejszy niż różnica między dwoma odniesieniami napięcia.
Dlatego też niezwykle trudne jest jednoczesne uruchomienie obu komparatorów. W przeciwnym razie wszystkie 4 tranzystory MOSFET zaczną przewodzić, prowadząc do zwarcia i zrujnując je wszystkie.
Kształt fali trójkąta jest zbudowany wokół napięcia przesunięcia DC. Zwiększanie lub zmniejszanie napięcia przesunięcia odpowiednio zmienia położenie impulsu fali trójkątnej.
Przełączenie fali trójkątnej w górę umożliwia aktywację komparatora IC1: D, zmniejszanie powoduje aktywację komparatora IC1: C. Gdy poziom napięcia fali trójkątnej znajduje się pośrodku dwóch odniesień napięcia, to żaden z komparatorów nie jest indukowany. Napięcie przesunięcia DC jest regulowane przez potencjometr P1 poprzez IC1: A, który jest zaprojektowany jako wtórnik napięcia.
Daje to źródło napięcia o niskiej impedancji wyjściowej, dzięki czemu napięcie przesunięcia prądu stałego jest mniej podatne na wpływ obciążenia IC1: B.
Gdy „potencjometr” jest przełączany, napięcie przesunięcia prądu stałego zaczyna się zmieniać, zwiększając lub zmniejszając w zależności od kierunku obracania potencjometru. Dioda D3 zabezpiecza sterownik przed odwrotną polaryzacją.
Rezystor R15 i kondensator C2 to prosty filtr dolnoprzepustowy. Ma to na celu oczyszczenie wszelkich skoków napięcia wywołanych przez tranzystory MOSFET, gdy włączają zasilanie silnika.
Lista części

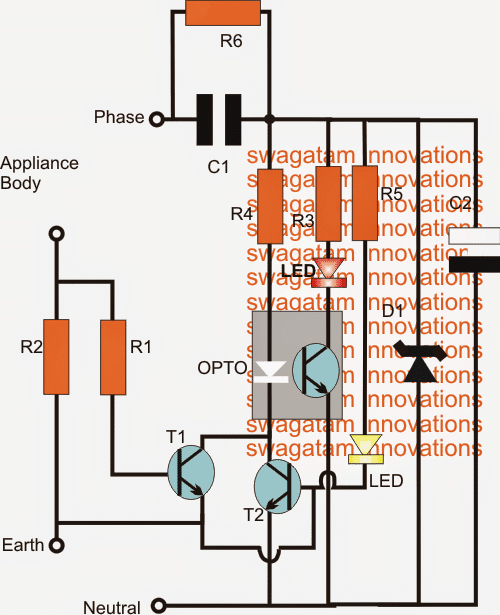
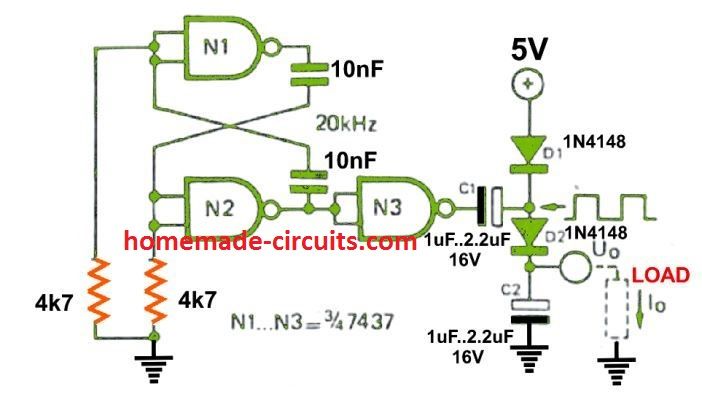
2) Dwukierunkowe sterowanie silnikiem za pomocą IC 556
Sterowanie prędkością i dwukierunkowe dla silników prądu stałego jest stosunkowo proste do wdrożenia. W przypadku silników zasilanych niezależnie prędkość jest w zasadzie funkcją liniową napięcia zasilania. Silniki z magnesem trwałym są podkategorią silników zasilanych niezależnie i są często używane w zabawkach i modelach.
W tym obwodzie napięcie zasilania silnika jest zmieniane za pomocą modulacji szerokości impulsu (PWM), co zapewnia dobrą wydajność, jak również stosunkowo wysoki moment obrotowy przy niskich prędkościach silnika. Pojedyncze napięcie sterujące od 0 do +10 V umożliwia odwrócenie prędkości silnika i zmianę od zera do maksymalnej w obu kierunkach.
Astable multiwibrator IC jest ustawiony jako oscylator 80 Hz i określa częstotliwość sygnału PWM. Aktualne źródło pobiera T1 ok. Napięcie piłokształtne na tym kondensatorze jest porównywane z napięciem sterującym w 1C2, które wysyła sygnał PWM do bufora N1-Na lub NPN1. Sterownik silnika oparty na Darlingtonie to obwód mostkowy, który może zasilać obciążenia do 4 A, pod warunkiem, że prąd docierania pozostaje poniżej 5 A, a tranzystory mocy T1-Ts zapewniają wystarczające chłodzenie. Diody D1, D5 zapewniają ochronę przed przepięciami indukcyjnymi pochodzącymi z silnika. Przełącznik S1 umożliwia natychmiastową zmianę kierunku obrotów silnika.

Obrazy prototypowe



Poprzedni: Zrozumienie obwodów wzmacniacza Dalej: Jak połączyć tranzystory (BJT) i MOSFET z Arduino