Prezentowany trójfazowy obwód VFD ( zaprojektowany przeze mnie ) może być używany do sterowania prędkością dowolnego trójfazowego szczotkowanego silnika prądu przemiennego lub nawet bezszczotkowego silnika prądu przemiennego. Pomysł został zgłoszony przez pana Toma
Korzystanie z VFD
Proponowany trójfazowy obwód VFD może być uniwersalnie stosowany w większości trójfazowych silników prądu przemiennego, w których skuteczność regulacji nie jest zbyt krytyczna.
Może być specjalnie używany do sterowania Prędkość silnika indukcyjnego klatkowego z trybem otwartej pętli, a być może także w trybie zamkniętej pętli, co zostanie omówione w dalszej części artykułu.
Moduły wymagane dla falownika 3-fazowego
Do zaprojektowania proponowanego 3-fazowego VFD lub obwodu napędu o zmiennej częstotliwości zasadniczo wymagane są następujące podstawowe etapy obwodu:
- Obwód kontrolera napięcia PWM
- Trójfazowy obwód sterujący mostka H strony wysokiej / niskiej strony
- 3-fazowy obwód generatora
- Napięcie na obwód przetwornicy częstotliwości do generowania parametru V / Hz.
Poznajmy szczegóły funkcjonowania powyższych etapów za pomocą następującego wyjaśnienia:
Prosty obwód kontrolera napięcia PWM można zobaczyć na poniższym schemacie:

Kontroler PWM
Już włączyłem i wyjaśniłem działanie powyższego stopnia generatora PWM, który jest zasadniczo zaprojektowany do generowania zmiennego wyjścia PWM na pinie3 układu scalonego IC2 w odpowiedzi na potencjał zastosowany na pinie 5 tego samego układu scalonego.
Ustawienie wstępne 1K pokazane na schemacie to pokrętło sterujące RMS, które można odpowiednio wyregulować w celu uzyskania pożądanej proporcjonalnej ilości napięcia wyjściowego w postaci PWM na pinie 3 układu IC2 do dalszego przetwarzania. Jest to ustawione w celu wytworzenia odpowiedniego wyjścia, które może być równoważne z napięciem sieciowym 220 V lub 120 V AC RMS.
Obwód sterownika mostka H.
Poniższy schemat przedstawia pojedynczy układ trójfazowego sterownika mostka H z układem scalonym IRS2330.
Projekt wygląda na prosty, ponieważ większość złożoności jest obsługiwana przez wbudowane chipy wbudowane w wyrafinowane obwody.
Dobrze obliczony sygnał trójfazowy jest podawany na wejścia HIN1 / 2/3 i LIN1 / 2/3 układu scalonego przez trójfazowy stopień generatora sygnału.
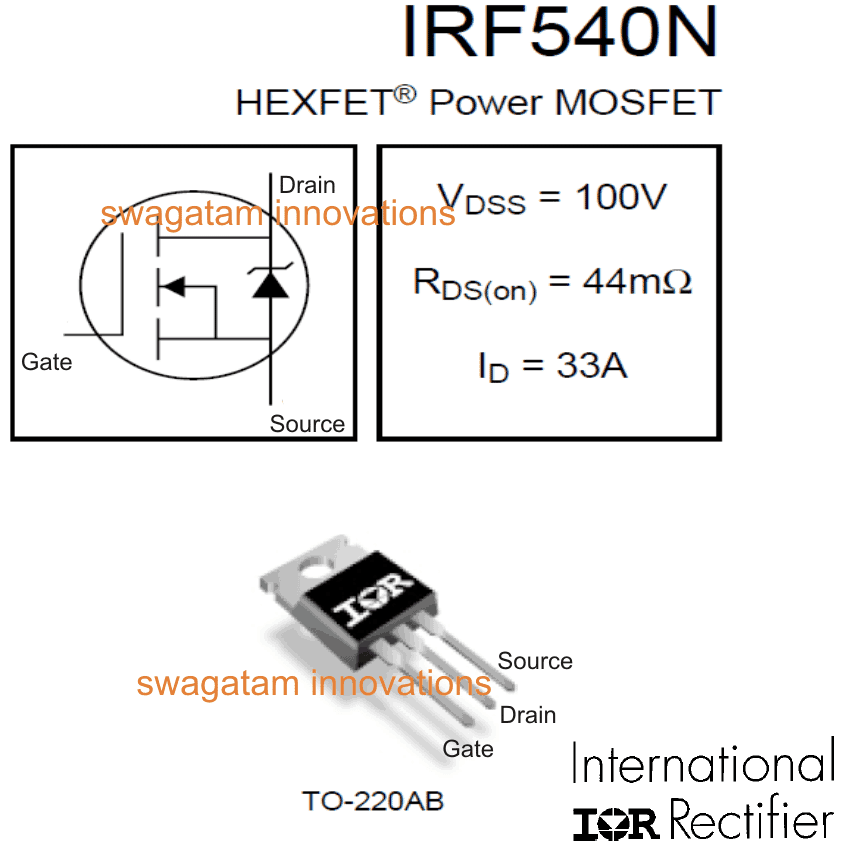
Dane wyjściowe IC IRS2330 można zobaczyć jako zintegrowany z 6 mosfetami lub siecią mostków IGBT, których dren jest odpowiednio skonfigurowany z silnikiem, który ma być sterowany.
Bramki mosfet / IGBT po stronie niskiej są zintegrowane ze stykiem IC2 # 3 omówionego powyżej stopnia obwodu generatora PWM w celu zainicjowania wtrysku PWM do etapu mostka mosfet. Ta regulacja ostatecznie pomaga silnikowi uzyskać żądaną prędkość zgodnie z ustawieniami (poprzez ustawienie wstępne 1 k na pierwszym schemacie).

Na poniższym schemacie wizualizujemy wymagany trójfazowy obwód generatora sygnału.

Konfiguracja obwodu generatora 3-fazowego
Generator trójfazowy jest zbudowany wokół kilku chipów CMOS CD4035 i CD4009, które generują dokładnie zwymiarowane sygnały trójfazowe na pokazanych pinoutach.
Częstotliwość sygnałów trójfazowych zależy od podawanych zegarów wejściowych, które powinny być 6 razy większe od zamierzonego sygnału trójfazowego. Oznacza to, że jeśli wymagana częstotliwość 3-fazowa wynosi 50 Hz, zegar wejściowy powinien wynosić 50 x 6 = 300 Hz.
Oznacza to również, że powyższe zegary mogą być zmieniane w celu zmiany skutecznej częstotliwości układu scalonego sterownika, który z kolei byłby odpowiedzialny za zmianę częstotliwości pracy silnika.
Jednakże, ponieważ powyższa zmiana częstotliwości musi być automatyczna w odpowiedzi na zmieniające się napięcie, napięcie na przetwornicę częstotliwości staje się niezbędne. W następnym etapie omówiono prosty, dokładny obwód przetwornicy napięcia na częstotliwość dla wymaganej implementacji.
Jak stworzyć stały stosunek V / F
Zwykle w silnikach indukcyjnych, aby utrzymać optymalną sprawność prędkości obrotowej silnika i momentu obrotowego, należy kontrolować prędkość poślizgu lub prędkość wirnika, co z kolei staje się możliwe dzięki utrzymaniu stałego stosunku V / Hz. Ponieważ strumień magnetyczny stojana jest zawsze stały, niezależnie od częstotliwości zasilania wejściowego, prędkość wirnika można łatwo kontrolować utrzymywanie stałego stosunku V / Hz .
W trybie otwartej pętli można to z grubsza zrobić, utrzymując z góry określone stosunki V / Hz i wdrażając je ręcznie. Na przykład na pierwszym schemacie można to zrobić przez odpowiednią regulację ustawień R1 i 1K. R1 określa częstotliwość, a 1K dostosowuje wartość skuteczną wyjścia, dlatego odpowiednio dostosowując dwa parametry możemy ręcznie wymusić wymaganą wartość V / Hz.
Jednak aby uzyskać stosunkowo dokładne sterowanie momentem obrotowym i prędkością silnika indukcyjnego, musimy wdrożyć strategię pętli zamkniętej, w której dane dotyczące prędkości poślizgu muszą być doprowadzone do obwodu przetwarzania w celu automatycznej regulacji stosunku V / Hz, tak aby wartość zawsze pozostaje bliska stałej.
Wdrażanie sprzężenia zwrotnego w zamkniętej pętli
Pierwszy schemat na tej stronie można odpowiednio zmodyfikować w celu zaprojektowania automatycznej regulacji V / Hz w pętli zamkniętej, jak pokazano poniżej:

Na powyższym rysunku potencjał na pinie # 5 układu IC2 określa szerokość SPWM, który jest generowany na pinie # 3 tego samego układu scalonego. SPWM są generowane przez porównanie próbki tętnienia 12 V sieci zasilającej na pinie nr 5 z falą trójkątną na pinie nr 7 układu IC2 i są one podawane do mosfetów po stronie niskiego napięcia w celu sterowania silnikiem.
Początkowo ten SPWM jest ustawiony na pewnym wyregulowanym poziomie (przy użyciu 1K perset), który wyzwala bramki IGBT strony niskiej mostka 3-fazowego w celu zainicjowania ruchu wirnika przy określonym nominalnym poziomie prędkości.
Gdy tylko wirnik zacznie się obracać, dołączony tachometr z mechanizmem wirnika powoduje proporcjonalny wzrost napięcia na styku nr 5 IC2, co proporcjonalnie powoduje, że SPWM poszerza się, powodując większe napięcie na cewkach stojana silnika. Powoduje to dalszy wzrost prędkości wirnika, powodując większe napięcie na pinie # 5 układu IC2, i trwa to do momentu, gdy równoważne napięcie SPWM nie będzie już w stanie rosnąć, a synchronizacja wirnika stojana osiągnie stan ustalony.
Powyższa procedura odbywa się na zasadzie samoregulacji przez cały okres eksploatacji silnika.
Jak wykonać i zintegrować obrotomierz
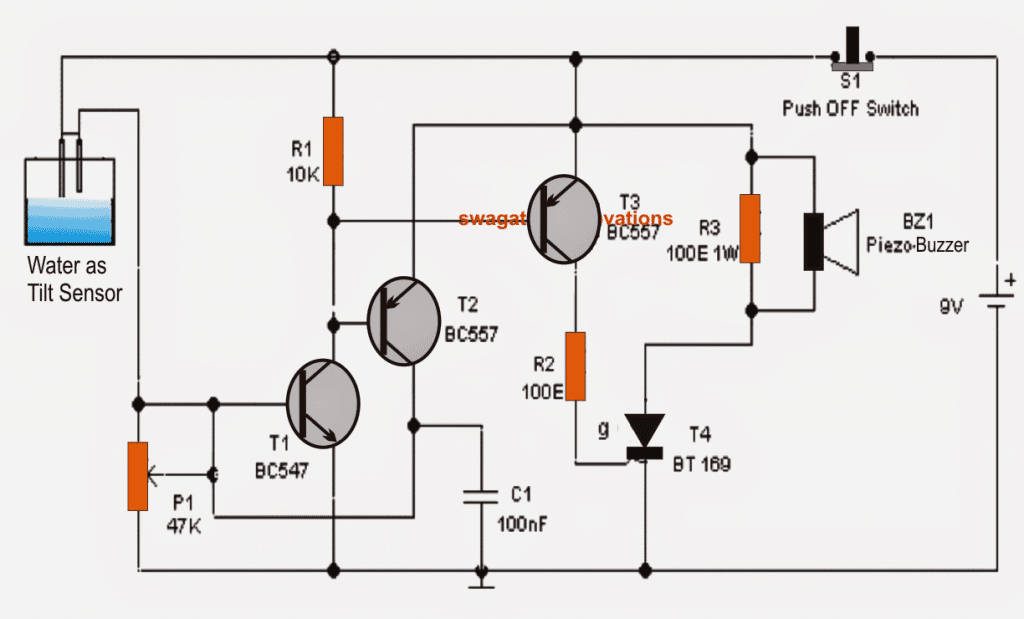
Na poniższym schemacie można zobaczyć prostą konstrukcję obrotomierza, która może być zintegrowana z mechanizmem wirnika, tak aby częstotliwość obrotowa była w stanie zasilać podstawę BC547.

Tutaj dane prędkości wirnika są zbierane z czujnika Halla lub sieci IR LED / Sensor i są przesyłane do podstawy T1.
T1 oscyluje przy tej częstotliwości i aktywuje obwód tachometru utworzony przez odpowiednią konfigurację obwodu monostabilnego IC 555.
Sygnał wyjściowy z powyższego obrotomierza zmienia się proporcjonalnie w odpowiedzi na częstotliwość wejściową u podstawy T1.
Wraz ze wzrostem częstotliwości wzrasta również napięcie na skrajnej prawej stronie wyjścia D3 i odwrotnie, co pomaga utrzymać stosunek V / Hz na względnie stałym poziomie.
Jak kontrolować prędkość
Prędkość silnika przy użyciu stałej V / F można osiągnąć poprzez zmianę częstotliwości wejściowej na wejściu zegara układu IC 4035. Można to osiągnąć poprzez doprowadzenie zmiennej częstotliwości z obwodu astabilnego IC 555 lub dowolnego standardowego obwodu astabilnego do wejścia zegara IC 4035.
Zmiana częstotliwości skutecznie zmienia częstotliwość pracy silnika, co odpowiednio zmniejsza prędkość poślizgu.
Jest to wykrywane przez tachometr, a obrotomierz proporcjonalnie zmniejsza potencjał na styku nr 5 układu IC2, co z kolei proporcjonalnie zmniejsza zawartość SPWM na silniku, aw konsekwencji napięcie silnika jest zmniejszane, zapewniając zmianę prędkości silnika przy prawidłowym wymagany stosunek V / F.
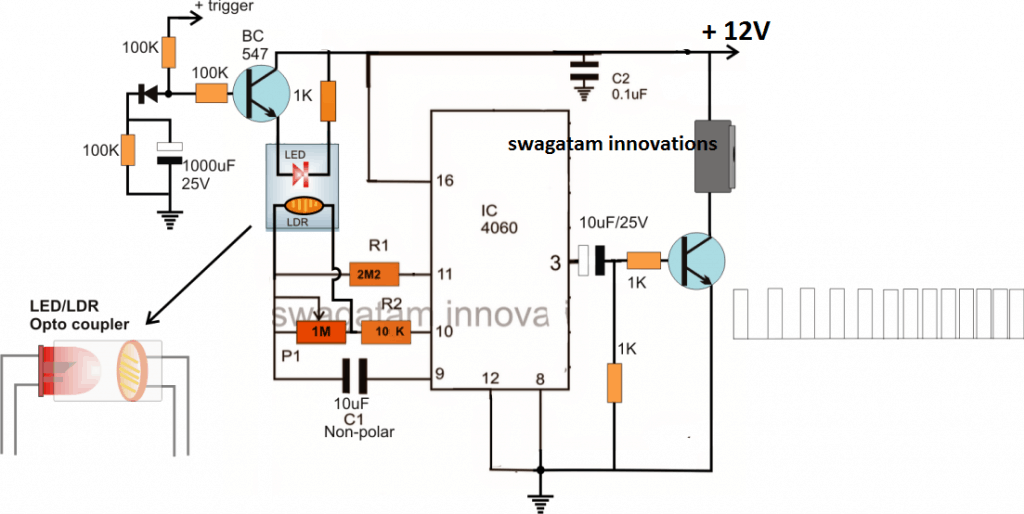
Domowy konwerter V na F.

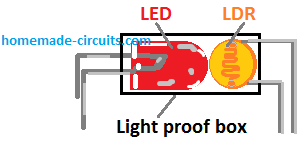
W powyższym obwodzie przetwornicy napięcia na częstotliwość stosowany jest układ IC 4060, a na jego rezystancję zależną od częstotliwości wpływa zespół LED / LDR do zamierzonych konwersji.
Zespół LED / LDR jest uszczelniony wewnątrz odpornej na światło skrzynki, a LDR jest umieszczony na rezystorze zależnym od częstotliwości 1M w układzie scalonym.
Ponieważ odpowiedź LDR / LDR jest dość liniowa, zmienne oświetlenie diody LED na LDR generuje proporcjonalnie zmieniającą się (rosnącą lub malejącą) częstotliwość na pinie 3 układu scalonego.
Zakres FSD lub V / Hz stopnia można ustawić przez odpowiednie ustawienie rezystora 1M lub nawet wartość C1.
Dioda LED to napięcie jest wyprowadzane i podświetlane przez PWM z pierwszego stopnia obwodu PWM. Oznacza to, że gdy zmieniają się PWM, oświetlenie LED również będzie się zmieniać, co z kolei spowoduje proporcjonalny wzrost lub spadek częstotliwości na pinie 3 układu IC 4060 na powyższym schemacie.
Integracja konwertera z VFD
Ta zmienna częstotliwość z IC 4060 wymaga teraz po prostu integracji z wejściem zegara 3-fazowego generatora IC CD4035.
Powyższe etapy stanowią główne składniki do wykonania 3-fazowego obwodu VFD.
Teraz należałoby omówić kwestię szyny DC BUS wymaganej do zasilania sterowników silników IGBT oraz procedur konfiguracyjnych dla całego projektu.
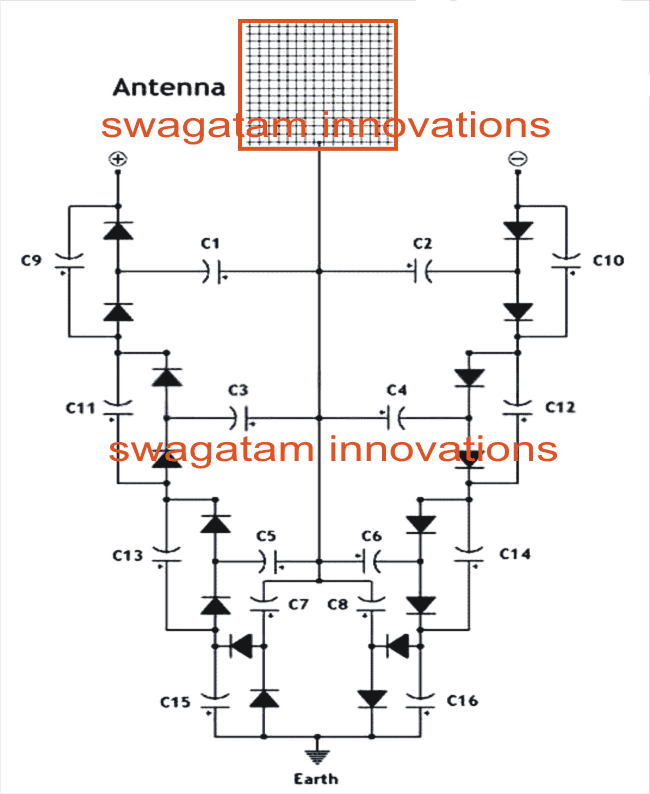
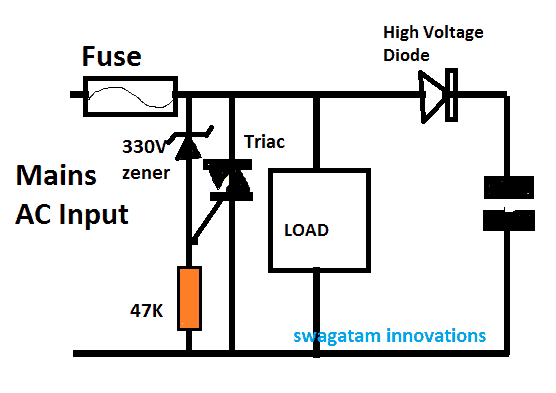
Magistrala DC zastosowana na szynach mostka H IGBT może być uzyskana poprzez prostowanie dostępnego trójfazowego wejścia zasilania przy użyciu następującej konfiguracji obwodu. Szyny IGBT DC BUS są połączone w punktach oznaczonych jako „obciążenie”

W przypadku źródła jednofazowego prostowanie można zrealizować przy użyciu standardowej konfiguracji sieci z 4 mostkami diodowymi.
Jak ustawić proponowany 3-fazowy obwód VFD
Można to zrobić zgodnie z następującymi instrukcjami:
Po przyłożeniu napięcia szyny DC na tranzystory IGBT (bez podłączonego silnika) wyreguluj ustawienie PWM 1k, aż napięcie na szynach zrówna się z zamierzonym napięciem silnika.
Następnie wyreguluj ustawienie wstępne IC 4060 1M, aby dostosować dowolne z wejść IC IRS2330 do wymaganego prawidłowego poziomu częstotliwości zgodnie z podanymi specyfikacjami silnika.
Po wykonaniu powyższych procedur można podłączyć określony silnik i zasilać go różnymi poziomami napięcia, parametrem V / Hz i potwierdzić automatyczną pracę V / Hz na podłączonym silniku.
Poprzedni: Jak zbudować obwód światła do uprawy Dalej: Zbadano obwód zmiękczacza wody