W poście omówiono elektroniczny regulator prędkości silnika lub obwód sterownika wykorzystujący pętlę sygnału sprzężenia zwrotnego obrotów na minutę przez sieć czujników efektu Halla. Pomysł został zgłoszony przez pana Imsa Naga.
Cele i wymagania obwodu
- Dziękuję Ci bardzo za Twój czas. Uważam, że ten obwód byłby odpowiedni do zasilania jednofazowego. Mój alternator to 3-fazowy 7KvA i chciałbym go połączyć z silnikiem Diesla wyposażonym w pedał przyspieszenia zamiast regulatora prędkości.
- To, co chciałbym zaimplementować, to - `` ELEKTRONICZNY REGULATOR PRĘDKOŚCI SILNIKA '', który prawdopodobnie miałby elektroniczny mechanizm sterowany serwomechanizmem, taki jak - Obwód czujnika prędkości (czujnik obrotów silnika) do napędzania silnika serwo w celu uruchomienia mechanizmu przyspieszenia w celu utrzymania stała prędkość silnika w odniesieniu do obciążenia alternatora.
- Pomogłoby to w zachowaniu częstotliwości, a także napięcia generatora. Mógłbym zadbać o aspekt mechaniczny, jeśli uprzejmie zaprojektujesz obwód do sterowania silnikiem Servo w taki sposób, aby można go było obracać w dowolnym kierunku w odniesieniu do zmiany obrotów silnika. Bardzo dziękuję w oczekiwaniu.
Schemat obwodu

UWAGA: SILNIK MOŻNA WYMIENIĆ NA ELEKTROMAGNETYCZNY 12 V SPRĘŻYNOWY
Projektowanie
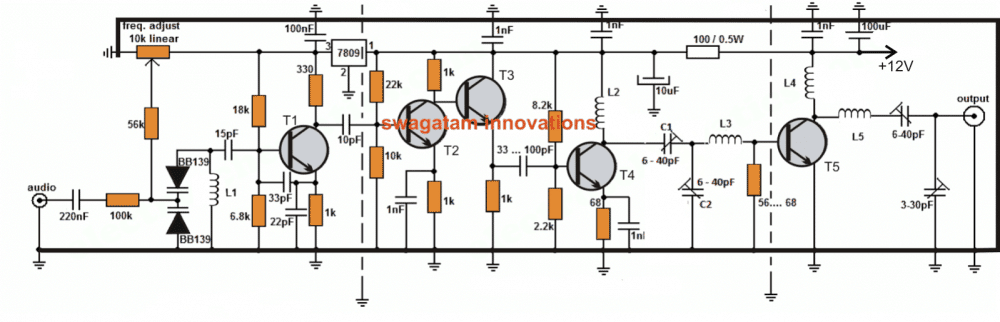
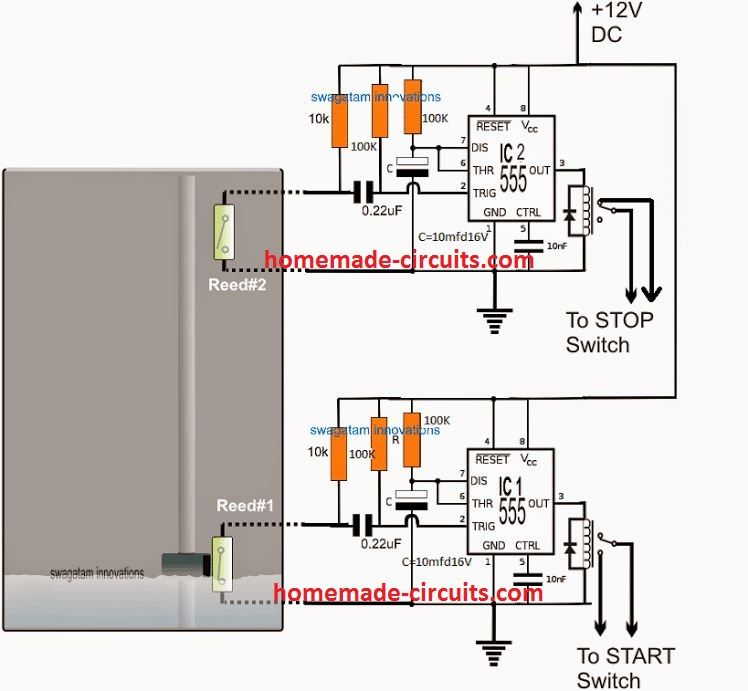
Obwód regulatora lub kontrolera prędkości silnika wysokoprężnego można zobaczyć na powyższym rysunku za pomocą procesora ze sprzężeniem zwrotnym RPM lub a obwód obrotomierza
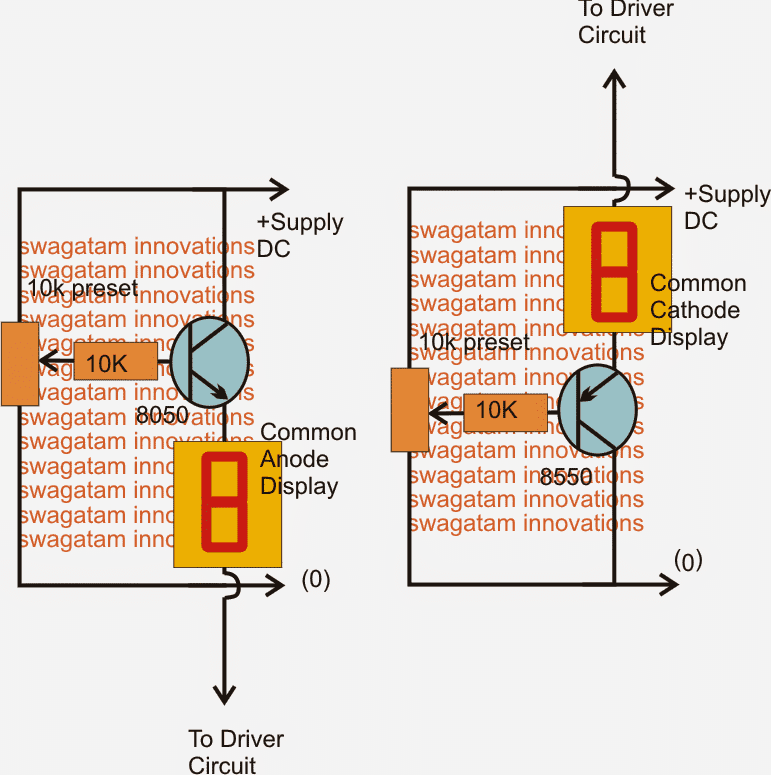
Lewy stopień IC1 555 tworzy prosty obwód tachometru, który jest skonfigurowany z Czujnik Halla przymocowany do koła ładunkowego silnika w celu wykrywania jego prędkości obrotowej.
Prędkość obrotowa jest przekształcana na proporcjonalnie zmieniającą się częstotliwość lub częstotliwość impulsów i jest stosowana u podstawy BJT w celu przełączenia pinu nr 2 IC1.
Działanie obwodu
IC1 jest w zasadzie ustawiony w trybie monostabilnym, co powoduje, że jego wyjście generuje proporcjonalnie regulowane przełączanie ON / OFF, którego okres jest ustawiany za pomocą pokazanego potencjometru 1M.
Wyjście z układu scalonego IC1, które przenosi zawartość RPM w postaci wydłużonych impulsów czasowych, jest odpowiednio wygładzane przez stopień integratora składający się z kilku elementów RC z rezystorem 1K, 10K i 22uF. Kondensatory 2,2uF.
Ten stopień konwertuje zgrubne dane RPM monostabilnego na dość płynnie zmieniające się lub wykładniczo zmieniające się napięcie.
To wykładniczo zmieniające się napięcie można zobaczyć jako połączone ze stykiem nr 5 następnego stopnia IC2 555 skonfigurowanego jako obwód stabilny.
Zadaniem tego astable jest generowanie bardzo wąskiego lub niskiego sygnału wyjściowego PWM na jego pinie # 3 w normalnych warunkach pracy.
W tym przypadku normalne warunki pracy odnoszą się do sytuacji, w której wykrywane obroty mieszczą się w określonym limicie, a styk # 5 układu IC2 nie otrzymuje żadnego napięcia wejściowego z wtórnika emitera. To niskie wyjście PWM można zrealizować przez odpowiednią regulację dwóch rezystorów 100k i kondensatora 1uF skojarzonego z pinem # 6/2 i pinem # 7 układu IC2.
To niskie PWM ze styku # 3 IC2 nie jest w stanie przełączyć TIP122 wystarczająco mocno i dlatego wskazany zespół koła silnikowego nie jest w stanie uzyskać wymaganego pędu i dlatego pozostaje wyłączony.
Jednak gdy prędkość obrotowa zaczyna rosnąć, obrotomierz zaczyna wytwarzać wykładniczo wyższe napięcie, co z kolei powoduje proporcjonalny wzrost napięcia na pinie # 5 układu IC2.
To z kolei pozwala TIP122 na lepsze przewodzenie, a podłączonemu silnikowi na uzyskanie wystarczającego momentu obrotowego, tak że zaczyna naciskać dołączony pedał przyspieszenia w kierunku trybu hamowania.
Procedura ta wymusza na silniku wysokoprężnym zmniejszenie prędkości, co odpowiednio powoduje, że obrotomierz i stopnie PWM przywracają ich pierwotne warunki i wymuszają kontrolowaną prędkość silnika wysokoprężnego.
Zamiast pokazanego układu silnika akceleratora, kolektor TIP122 może być alternatywnie podłączony do Jednostka CDI silnika wysokoprężnego dla identycznej redukcji prędkości, dla ułatwienia stałego i bardziej niezawodnego wdrożenia omawianego elektronicznego sterowania prędkością obrotową silnika lub obwodu elektronicznego regulatora prędkości silnika.
Jak skonfigurować
Początkowo pozostaw stopnie IC1, IC2 odłączone, usuwając połączenie popychacza emitera z pinem # 5 IC2.
Następnie upewnij się, że dwa rezystory 100k są odpowiednio zmienione i wyregulowane tak, aby pin nr 3 IC2 generował możliwie najwęższe PWM (przy około 5% współczynniku włączenia).
Następnie używając pliku Regulowany zasilacz od 0 do 12 V. , przyłożyć zmienne napięcie do pinu nr 5 układu IC2 i potwierdzić proporcjonalnie rosnące PWM na pinie nr 3.
Po przetestowaniu części astabilnej należy sprawdzić jej obrotomierz, stosując znane impulsy RPM odpowiadające żądanemu przekroczeniu wartości granicznej RPM. Podczas regulacji ustawienia wstępnego podstawy BJT popychacza emitera tak, aby jego emiter był w stanie wygenerować co najmniej 10 V lub poziom wystarczający, aby spowodować, że IC2 PWM wytworzy wymagany moment obrotowy na podłączonym silniku sterującym pedałem.
Po dalszych dopracowaniach i eksperymentach można spodziewać się uzyskania wymaganej automatycznej kontroli prędkości silnika i związanego z nim obciążenia.
AKTUALIZACJA
Jeśli silnik zostanie zastąpiony cewką sprężynową, powyższy projekt można znacznie uprościć, jak podano poniżej:

Wałek elektromagnesu mógłby być połączony z pedałem przyspieszenia w celu osiągnięcia zamierzonej automatycznej regulacji prędkości silnika.
Więcej opcji dotyczących przetwornicy częstotliwości na napięcie można znaleźć w Ten artykuł .
Poprzedni: Obwód aplikacji siłowni fitness sterowany zegarem Dalej: Ładowanie baterii za pomocą obwodu maty piezo