
W dzisiejszych czasach robotyka staje się jedną z najbardziej zaawansowanych w dziedzinie technologii. Plik zastosowania robotyki dotyczą głównie samochodów, medycyny, budownictwa, obrony, a także używane jako robot strażacki pomóc ludziom z wypadku pożarowego. Ale sterowanie robotem za pomocą pilota lub przełącznika jest dość skomplikowane. Tak więc opracowano nowy projekt, czyli robota sterującego gestami opartego na akcelerometrze. Głównym celem tego projektu jest sterowanie ruchem robota gestem ręki z wykorzystaniem akcelerometru.

Robot sterujący gestami oparty na akcelerometrze
Robot sterujący gestami oparty na akcelerometrze
Projekt obejmuje sekcję nadajnika i sekcję odbiornika. Plik wymagane komponenty do budowy tego projektu są Ht12e, Ht12d, L293D, AT89S52, 7805, kondensator, kryształ, złącze PBT, antena jednobiegunowa, rezystor, dioda LED, akcelerometr i bateria. Akcelerometr jest podstawowym urządzeniem w tym projekcie.
Akcelerometr lub nadajnik zależy od gestu dłoni. Za pośrednictwem nadajnika polecenie jest odbierane i przetwarzane za pomocą mikrokontrolera At89S51. To mikrokontroler daje sygnał do robota, aby poruszał się w preferowanym kierunku. Podstawowa zasada działania tego robota to zbiór sygnałów danych o przekazywaniu odczytów urządzenia do mikrokontrolera zamontowanego w robocie. Zaprogramowany mikrokontroler działa zgodnie z programem, dzięki czemu robot odpowiednio pracuje.
Robot sterowany gestami za pomocą akcelerometru to jeden z rodzajów robotów, który można obsługiwać ruchem ręki, umieszczając na nim akcelerometr. Projekt jest podzielony na dwie części: nadajnik i odbiornik. W przypadku, gdy urządzenie gestowe działa jako nadajnik, a robot jako odbiornik, po umieszczeniu na dłoni urządzenia nadawczego (akcelerometru) wysyła sygnały do robota w celu wykonania żądanej operacji.
Główne komponenty zastosowane w sekcji nadawczej obejmują akcelerometr, komparator, koder HT12E IC i Nadajnik RF .
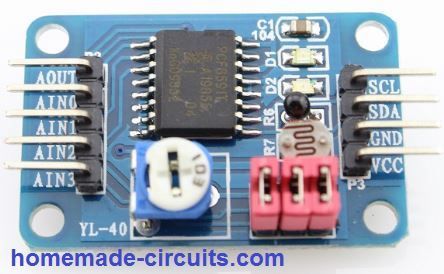
Akcelerometr
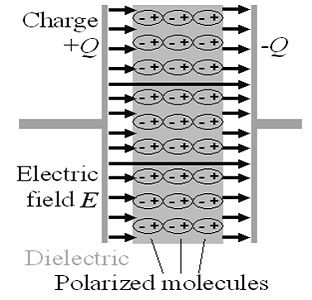
Akcelerometr to jeden rodzaj czujnika i podaje dane analogowe poruszając się w kierunku X, Y i Z. Kierunki te zależą od typu czujnika. Schemat akcelerometru pokazano poniżej. Ten czujnik składa się z kierunków strzałek, jeśli przechylimy czujnik w jednym kierunku, to dane na konkretnym pinie zmienią się w postaci analogowej. Akcelerometr składa się z sześciu pinów, gdzie funkcja każdego pinu omówiono poniżej.

Akcelerometr
- Pin-1: pin VDD służy do zapewnienia zasilania + 5V na ten pin
- Pin-2: pin GND jest połączony z masą w celu polaryzacji
- Pin-3: pin X odbierze dane w kierunku X.
- Pin-4: pin Y odbierze dane w kierunku Y.
- Pin-5: pin Z otrzyma dane w kierunku Z.
- Pin-6: Kołek ST służy do regulacji czułości akcelerometru 1,5g lub 2g lub 3g lub 4g
Komparator
Komparator służy do zmiany napięcia analogowego na napięcie cyfrowe i porównuje to napięcie analogowe z napięciem odniesienia i podaje precyzyjnie niskie lub wysokie napięcie
Encoder
Ten koder służy do kodowania 4-bitowych danych i przesyła je za pomocą modułu nadajnika RF.
Moduł nadajnika RF
Moduł RF TX pracuje z częstotliwością 433 MHz i ten moduł jest łatwo dostępny na rynku przy niskich kosztach
Główne komponenty zastosowane w sekcji odbiorczej to odbiornik, dekoder, mikrokontroler i sterownik silnika.

Sekcja nadajnika
Odbiornik RF
Odbiornik RF tego projektu będzie odbierał dane przesyłane przez urządzenie nadawcze.
Dekoder
Dekoder służy do zamiany danych szeregowych na dane równoległe, które są odbierane z modułu odbiornika RF.
Mikrokontroler
Plik mikrokontroler jest najważniejszą częścią robota. W obwodzie zastosowano mikrokontroler z rodziny 8051, który zapewnia zdolność decyzyjną
Kierowca motocyklu
Sterownik silnika to urządzenie, które daje ruch w celu wykonania zadania, takiego jak silnik. Dlatego wymagamy, aby sterownik silnika prowadził je przez kontroler. Interfejs między silnikiem a mikrokontrolerem można wykonać za pomocą układu scalonego sterownika silnika L293D w tym obwodzie.
W sekcji odbiornika moduł odbiornika RF odbiera dane z nadajnika. Odebrane dane mogą być dekodowane przez układ scalony HT12D. Odebrane dane mogą być przetwarzane przez mikrokontroler AT89S51, a do sterowania silnikiem służy sterownik silnika.

Sekcja odbiornika
Robot sterujący gestami działa
Robot sterowany gestami z akcelerometrem porusza się zgodnie z ruchem dłoni, gdy umieszczamy akcelerometr na Twojej dłoni. Kiedy przechylamy rękę z akcelerometrem przed robota, robot rusza do przodu, aż do wykonania kolejnego ruchu. Kiedy przechylamy dłoń do tyłu, robot zmienia kierunek i stan. Następnie zaczyna się poruszać do tyłu, aż do podania następnego sygnału. Kiedy przechylamy rękę na lewą stronę, robot przesuwa się na lewą stronę, aż do podania kolejnego sygnału, w ten sam sposób, jak przechylamy rękę w prawą stronę, to robot przesuwa się w prawą stronę.
Aplikacje
Plik zastosowania akcelerometru oparty robot sterowany gestami to
- Roboty te są używane w zastosowaniach wojskowych do obsługi robotów
- Roboty te są używane w zastosowaniach medycznych do celów chirurgicznych
- Te robotyki są używane w budownictwie
- Te robotyki są używane w przemyśle do sterowania wózkiem i podnośnikiem.
Tak więc chodzi o robota sterującego gestami opartego na akcelerometrze, jego działanie i zastosowania Mamy nadzieję, że lepiej zrozumieliście tę koncepcję. Ponadto wszelkie wątpliwości dotyczące tej koncepcji lub projekty elektroniczne , prosimy o wyrażenie opinii, komentując w sekcji komentarzy poniżej. Oto pytanie do Ciebie, jakie są zastosowania robota sterującego gestami opartego na akcelerometrze?
Kredyty fotograficzne:
- Robot sterujący gestami oparty na akcelerometrze ytimg
- Akcelerometr static.flickr



{kind=link}
{kind=link}