To elektryczna maszyna przetwarza energię elektryczną na energię mechaniczną nazywany jest silnikiem elektrycznym. Przede wszystkim silnik elektryczny to proste urządzenie elektrostatyczne stworzone przez szkockiego mnicha Andrew Gordona w latach czterdziestych XVIII wieku. Ale w 1821 roku Michael Faraday zademonstrował zamianę energii elektrycznej w energię mechaniczną.
Silniki elektryczne dzieli się głównie na dwie kategorie: silniki prądu przemiennego i Silniki prądu stałego . Ponownie, każda kategoria jest podzielona na wiele typów. Wiele obciążeń, takich jak mikser, szlifierka, wentylatory, itp., To najczęściej używane urządzenia domowe, w których możemy znaleźć różne typy silników i mogą one pracować z różnymi prędkościami z zapewnieniem kontroli prędkości silników. W tym artykule omówimy jeden z głównych typów silników prądu stałego, a mianowicie Silnik krokowy i jego sterowanie za pomocą mikrokontrolera.
Silnik krokowy
Synchroniczne i bezszczotkowy silnik prądu stałego który przekształca impulsy elektryczne w ruchy mechaniczne, a tym samym obraca się stopniowo o pewien kąt między każdym krokiem, aby zakończyć pełny obrót, nazywany jest silnikiem krokowym. Kąt między krokami obrotu silnika krokowego nazywany jest kątem krokowym silnika.

Silnik krokowy
Silniki krokowe dzieli się na dwa typy w zależności od ich uzwojenia: jednobiegunowe silniki krokowe i bipolarne silniki krokowe. Jednobiegunowy silnik krokowy jest często używany w wielu zastosowaniach ze względu na łatwość obsługi w porównaniu z bipolarnym silnikiem krokowym. Istnieją jednak różne typy silników krokowych, takie jak silnik krokowy z magnesami trwałymi, silnik krokowy o zmiennej reluktancji i hybrydowy silnik krokowy.
Sterowanie silnikiem krokowym
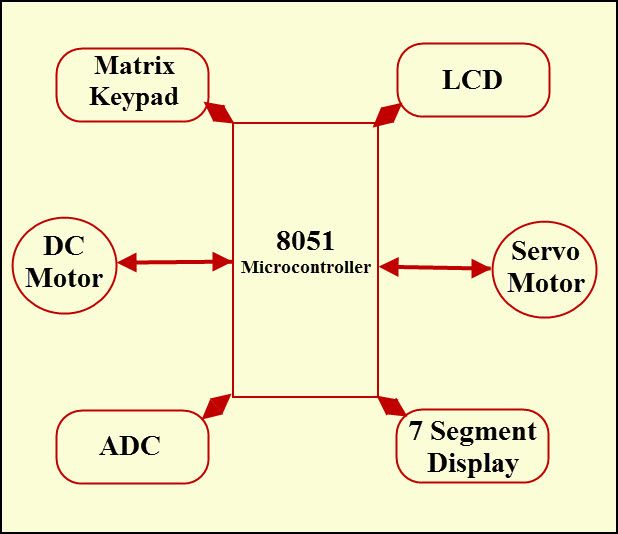
Silnik krokowy można sterować różnymi technikami, ale tutaj omawiamy sterowanie silnikiem krokowym za pomocą Mikrokontroler Atmega . 89C51 to mikrokontroler platformy Rodzina mikrokontrolerów 8051 .

Schemat blokowy sterowania silnikiem krokowym
Schemat blokowy sterowania silnikiem krokowym za pomocą mikrokontrolera 8051 pokazano na rysunku zasilacz , mikrokontroler, silnik krokowy i bloki przełączników sterujących.
2 metody projektowania obwodu sterującego silnika krokowego
Zaprojektowano sterownik silnika krokowego przy użyciu mikrokontrolerów 8051 i obwód przełączający do sterowania prędkością silnika krokowego. Obwód przełącznika sterującego można zaprojektować za pomocą przełączniki tranzystorowe lub za pomocą układu scalonego sterownika silnika krokowego, takiego jak ULN2003 w miejsce tranzystorów.
1. Obwód sterowania za pomocą układu scalonego sterownika silnika krokowego
Jednobiegunowy silnik krokowy można obracać, zasilając cewki stojana w sekwencji. Sekwencja tych sygnałów napięciowych przyłożonych do cewek lub przewodów silnika jest wystarczająca do napędzania silnika, a zatem nie jest wymagany żaden obwód sterujący do sterowania kierunkiem prądu w cewkach stojana.

Sterowanie silnikiem krokowym za pomocą układu scalonego
Dwufazowy silnik krokowy składa się z czterech końcowych przewodów podłączonych do cewek i dwóch wspólnych przewodów połączonych z dwoma końcowymi przewodami w celu utworzenia dwóch faz. Punkty wspólne i punkty końcowe dwóch faz są połączone odpowiednio z masą lub Vcc i pinami mikrokontrolera. Aby obrócić silnik, punkty końcowe obu faz należy zasilić. Przede wszystkim napięcie jest przykładane do pierwszego punktu końcowego fazy1, a kolejne napięcie jest przykładane do pierwszego punktu końcowego fazy2 i tak dalej.
Silnik krokowy może pracować w różnych trybach, takich jak tryb krokowy falownika, tryb krokowy pełnego napędu i tryb krokowy połowy napędu.
Tryb krokowy falownika
Powtarzając powyższą sekwencję, silnik można obracać w trybie krokowym z napędem falowym w kierunku zgodnym lub przeciwnym do ruchu wskazówek zegara, w oparciu o wybór punktów końcowych. Poniższa tabela przedstawia kolejność faz sygnału dla trybu krokowego falownika.


Tryb krokowy falownika
Tryb krokowy pełnego dysku
Jednoczesne zasilenie dwóch punktów końcowych różnych faz powoduje osiągnięcie trybu pełnego napędu krokowego. W tabeli przedstawiono kolejność faz sygnału dla trybu pełnego napędu z krokiem.


Tryb krokowy pełnego dysku
Tryb krokowy połowy napędu
Kombinacja kroków trybu falowego i pełnego napędu krokowego pozwala uzyskać tryb taktowania połowy napędu. Zatem w tym trybie kąt kroku jest podzielony na połowę. W tabeli przedstawiono kolejność faz sygnału w trybie taktowania połowy napędu.


Tryb krokowy połowy napędu
Ogólnie kąt kroku zależy od rozdzielczości silnika krokowego. Wielkość kroków i kierunek obrotów są wprost proporcjonalne do liczby i kolejności sekwencji wejściowej. Prędkość obrotowa wału zależy od częstotliwości sekwencji wejściowej. Moment obrotowy i liczba magnesów namagnesowanych w czasie są proporcjonalne.
Silnik krokowy wymaga prądu 60mA, ale maksymalny prąd znamionowy mikrokontrolera Atmega AT89C51 to 50mA. Tak więc sterownik silnika krokowego IC jest używany do połączenia silnika krokowego z mikrokontrolerem w celu przesyłania sygnałów.
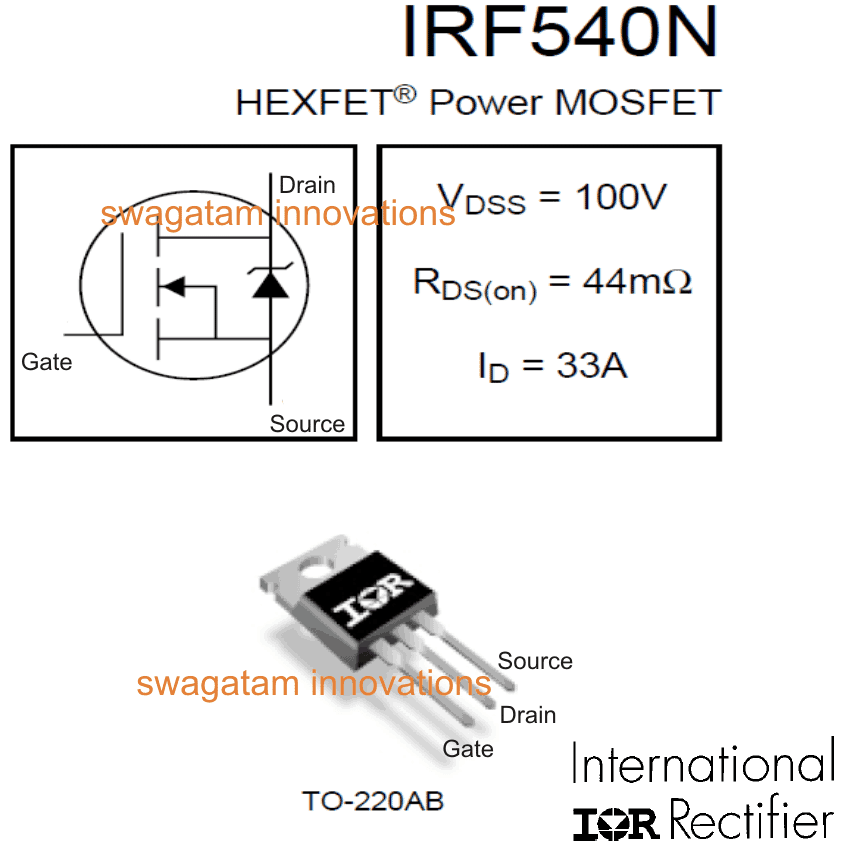
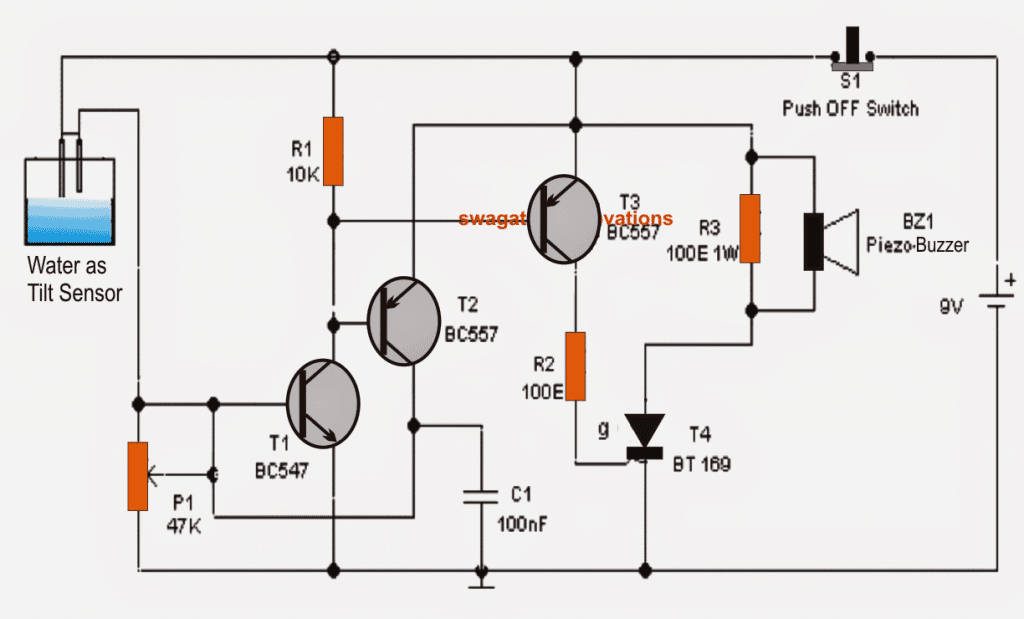
2. Obwód przełącznika sterującego za pomocą tranzystorów
Zasilanie obwodu można zapewnić obniżając napięcie z 230V do 7,5V za pomocą transformatora obniżającego napięcie, a następnie prostowanie przez mostek prostowniczy z diodami . To wyprostowane wyjście jest podawane do kondensatora filtrującego, a następnie przechodzi przez regulator napięcia. Wyjście regulowane 5V jest uzyskiwane z regulatora napięcia. Pin 9 resetowania jest podłączony między kondensatorem a rezystorem.

Obwód sterowania silnika krokowego za pomocą tranzystora
Ogólnie silnik krokowy składa się z czterech cewek, jak pokazano na rysunku. Tak więc, aby napędzać silnik, potrzebne są cztery obwody sterownika silnika. Zamiast używać układu scalonego sterownika silnika krokowego do sterowania silnikiem, cztery tranzystory są podłączone jako obwody sterownika odpowiednio na 21, 22, 23 i 24 pinach mikrokontrolera.
Jeśli tranzystory zaczną przewodzić, wówczas wokół cewki powstanie pole magnetyczne powodujące obrót silnika. Prędkość silnika krokowego jest wprost proporcjonalna do częstotliwości impulsów wejściowych. Oscylator kwarcowy jest podłączony do pinów 18 i 19, aby zapewnić częstotliwość zegara mikrokontrolera wynoszącą około 11,019 MHz.
Czas wykonania dowolnej instrukcji można obliczyć za pomocą poniższego wzoru
Czas = ((C * 12)) / f
Gdzie C = numer cyklu
A F = częstotliwość kryształu
Jeden z obwodów opartych na aplikacji, który wykorzystuje silnik krokowy do obracania panelu słonecznego, jest opisany poniżej.
Sterowanie silnikiem krokowym za pomocą zaprogramowanego mikrokontrolera 8051
Projekt paneli słonecznych śledzących słońce ma na celu generowanie maksymalnej ilości energii poprzez automatyczną regulację panelu słonecznego. W tym projekcie silnik krokowy sterowany przez zaprogramowany mikrokontroler z rodziny 8051 jest połączony z panelem słonecznym, aby utrzymywać panele słoneczne zawsze prostopadle do słońca.

Sterowanie silnikiem krokowym za pomocą mikrokontrolera firmy Edgefxkits.com
Plik zaprogramowany mikrokontroler generuje skokowe impulsy elektryczne w regularnych odstępach czasu do silnika krokowego w celu obracania panelu słonecznego. Układ scalony sterownika jest używany do sterowania silnikiem krokowym, ponieważ kontroler nie jest w stanie zapewnić zapotrzebowania mocy silnika.
Prosimy o pozostawienie sugestii, opinii i zapytań, zamieszczając komentarze w sekcji komentarzy poniżej. Zrobimy co w naszej mocy, aby pomóc Ci technicznie w odniesieniu do tego artykułu i opracowywanie projektów elektrycznych i elektronicznych za pomocą silnika krokowego.