IC TL494 to wszechstronny układ sterowania PWM, który można zastosować na wiele różnych sposobów w obwodach elektronicznych. W tym artykule szczegółowo omówimy główne funkcje układu scalonego, a także sposób jego wykorzystania w praktycznych obwodach.
Ogólny opis
Układ IC TL494 jest specjalnie zaprojektowany dla obwodów aplikacji modulacji szerokości impulsu pojedynczego chipa. Urządzenie jest przeznaczone głównie do obwodów sterowania zasilaniem, które można efektywnie zwymiarować za pomocą tego układu scalonego.
Urządzenie jest wyposażone we wbudowany zmienny oscylator, stopień kontrolera czasu martwego (DTC), a sterowanie flip flop do sterowania impulsowego - precyzja Regulator 5 V. , dwa wzmacniacze błędów i niektóre obwody bufora wyjściowego.
Wzmacniacze błędu charakteryzują się napięciem w trybie wspólnym od - 0,3 V do VCC - 2 V.
Martwa kontrola czasu komparator jest ustawiony ze stałą wartością przesunięcia w celu zapewnienia stałego czasu martwego wynoszącego około 5%.
Funkcję oscylatora na chipie można zignorować, łącząc styk RT nr 14 układu scalonego ze stykiem odniesienia nr 14 i przez zewnętrzne dostarczenie sygnału piłokształtnego do styku przekładnika prądowego nr 5. Ta funkcja umożliwia również synchroniczne sterowanie wieloma układami scalonymi TL494 z różnymi szynami zasilania.
Tranzystory wyjściowe wewnątrz chipa z wyjściami pływającymi są przystosowane do dostarczania albo wspólny emiter wyjście lub urządzenie wyjściowe podążające za emiterem.
Urządzenie umożliwia użytkownikowi uzyskanie oscylacji typu przeciwsobnego lub oscylacyjnego z pojedynczym końcem na swoich pinach wyjściowych poprzez odpowiednią konfigurację styku # 13, który jest pinem funkcji sterowania wyjściami.
Obwody wewnętrzne uniemożliwiają żadnemu z wyjść wytwarzanie podwójnego impulsu, podczas gdy układ scalony jest podłączony w funkcji przeciwsobnej.
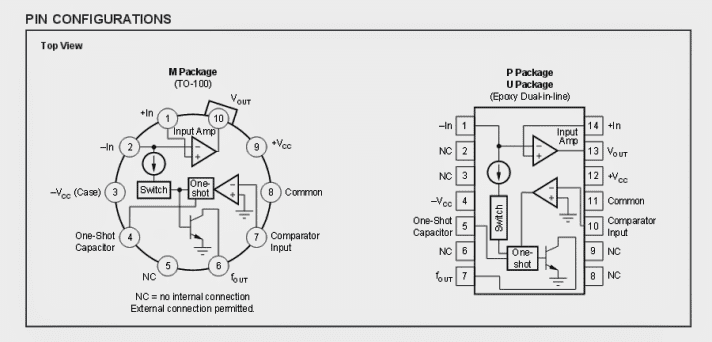
Funkcja i konfiguracja pinów
Poniższy schemat i wyjaśnienia dostarczają nam podstawowych informacji dotyczących funkcji pinów w IC TL494.

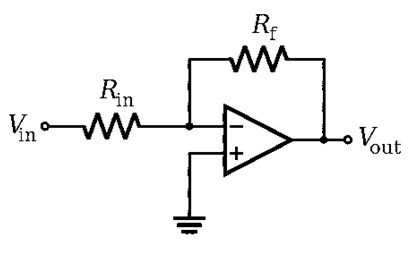
- Pin # 1 i Pin # 2 (1 IN + i 1IN-): Są to nieodwracające i odwracające wejścia wzmacniacza błędu (wzmacniacz operacyjny 1).
- Pin # 16, Pin # 15 (1 IN + i 1IN-): Jak wyżej, są to nieodwracające i odwracające wejścia wzmacniacza błędu (wzmacniacz operacyjny 2).
- Pin # 8 i Pin # 11 (C1, C2): To są pliki wyjścia 1 i 2 układu scalonego, które łączą się z kolektorami odpowiednich wewnętrznych tranzystorów.
- Pin # 5 (CT): Ten pin musi być połączony z zewnętrznym kondensatorem w celu ustawienia częstotliwości oscylatora.
- Pin # 6 (RT): Ten pin musi być połączony z zewnętrznym rezystorem w celu ustawienia częstotliwości oscylatora.
- Pin # 4 (DTC): To Wejście wewnętrznego wzmacniacza operacyjnego, który kontroluje działanie układu scalonego w czasie martwym.
- Pin # 9 i Pin # 10 (E1 i E2): To są wyjścia układu scalonego, które łączą się z pinami emitera wewnętrznego tranzystora.
- Pin # 3 (opinia): Jak sugeruje nazwa, to Wejście pin służy do integracji z wyjściowym sygnałem próbki w celu uzyskania żądanego automatycznego sterowania systemem.
- Pin # 7 (masa): Ten pin jest pinem uziemienia układu scalonego, który musi być połączony z 0 V źródła zasilania.
- Pin # 12 (VCC): To jest dodatni pin zasilania układu scalonego.
- Pin # 13 (O / P CNTRL): Ten pin można skonfigurować do włączania wyjścia układu scalonego w trybie push-pull lub single ended.
- Pin # 14 (REF): To wynik pin zapewnia stałe napięcie wyjściowe 5 V, które może być użyte do ustalenia napięcia odniesienia dla błędnych wzmacniaczy operacyjnych w trybie komparatora.
Bezwzględne maksymalne oceny
- (VCC) Maksymalne napięcie zasilania nie może przekraczać = 41 V.
- (VI) Maksymalne napięcie na pinach wejściowych nie może przekraczać = VCC + 0,3 V.
- (VO) Maksymalne napięcie wyjściowe na kolektorze wewnętrznego tranzystora = 41 V.
- (IO) Maksymalny prąd na kolektorze wewnętrznego tranzystora = 250 mA
- Maksymalne ciepło lutowania pinów IC w odległości 1,6 mm (1/16 cala) od korpusu IC nie może przekraczać 10 sekund przy 260 ° C
- Tstg Zakres temperatur przechowywania = –65/150 ° C
Zalecane warunki pracy
Poniższe dane zawierają zalecane napięcia i prądy, które mogą być używane do obsługi układu scalonego w bezpiecznych i wydajnych warunkach:
- Zasilanie VCC: od 7 V do 40 V.
- VI Napięcie wejściowe wzmacniacza: -0,3 V do VCC - 2 V.
- Napięcie kolektora tranzystora VO = 40, prąd kolektora dla każdego tranzystora = 200 mA
- Prąd na pinie sprzężenia zwrotnego: 0,3 mA
- Zakres częstotliwości oscylatora fOSC: 1 kHz do 300 kHz
- Wartość kondensatora czasowego oscylatora CT: od 0,47 nF do 10000 nF
- Wartość rezystora czasowego oscylatora RT: od 1,8 k do 500 kiloomów.
Schemat układu wewnętrznego

Jak korzystać z IC TL494
W kolejnych akapitach poznamy ważne funkcje IC TL494 i jak go używać w obwodach PWM.
Przegląd: Układ scalony TL494 został zaprojektowany w taki sposób, że nie tylko zawiera ważne obwody potrzebne do sterowania zasilaczem impulsowym, ale dodatkowo rozwiązuje kilka fundamentalnych trudności i minimalizuje potrzebę dodatkowych stopni obwodu niezbędnych w całej strukturze.
TL494 to w zasadzie obwód sterujący z modulacją szerokości impulsu (PWM) o stałej częstotliwości.
Funkcję modulacji impulsów wyjściowych uzyskuje się, gdy wewnętrzny oscylator porównuje swój przebieg piłokształtny przez kondensator taktowania (CT) z obiema parami sygnałów sterujących.
Stopień wyjściowy jest przełączany w okresie, gdy napięcie piłokształtne jest wyższe niż sygnały sterujące napięciem.
Wraz ze wzrostem sygnału sterującego skraca się czas, w którym wejście piłokształtne jest wyższe, w konsekwencji zmniejsza się długość impulsu wyjściowego.
Przerzutnik sterujący impulsami naprzemiennie kieruje modulowany impuls do każdego z dwóch tranzystorów wyjściowych.
Regulator odniesienia 5 V.
TL494 tworzy wewnętrzne napięcie odniesienia 5 V, które jest podawane na pin REF.
To wewnętrzne odniesienie pomaga opracować stabilne stałe odniesienie, które działa jak regulator wstępny w celu zapewnienia stabilnego zasilania. To odniesienie jest następnie niezawodnie wykorzystywane do zasilania różnych wewnętrznych stopni układu scalonego, takich jak sterowanie wyjściami logicznymi, sterowanie impulsami przerzutnika, oscylator, komparator regulacji czasu martwego i komparator PWM.
Oscylator
Oscylator generuje dodatni przebieg piłokształtny dla czasu martwego i komparatorów PWM, dzięki czemu etapy te mogą analizować różne sygnały wejściowe sterowania.
To RT i CT są odpowiedzialne za określenie częstotliwości oscylatora, a zatem mogą być programowane zewnętrznie.
Przebieg piłokształtny generowany przez oscylator ładuje zewnętrzny kondensator taktowania CT prądem stałym, określonym przez rezystor uzupełniający RT.
Powoduje to powstanie przebiegu napięcia o liniowym narastaniu. Za każdym razem, gdy napięcie na przekładniku prądowym osiąga 3 V, oscylator szybko je rozładowuje, co następnie wznawia cykl ładowania. Prąd dla tego cyklu ładowania oblicza się według wzoru:
Icharge = 3 V / RT --------------- (1)
Okres przebiegu piłokształtnego określa:
T = 3 V x CT / Icharge ---------- (2)
Częstotliwość oscylatora jest zatem określana za pomocą wzoru:
f OSC = 1 / RT x CT --------------- (3)
Jednak ta częstotliwość oscylatora będzie kompatybilna z częstotliwością wyjściową, gdy wyjście jest skonfigurowane jako single-ended. Po skonfigurowaniu w trybie przeciwsobnym częstotliwość wyjściowa będzie równa 1/2 częstotliwości oscylatora.
Dlatego dla wyjścia single-ended można zastosować powyższe równanie nr 3.
W przypadku aplikacji typu push pull wzór będzie wyglądał następująco:
f = 1 / 2RT x CT ------------------ (4)
Kontrola czasu martwego
Konfiguracja pinów czasu martwego reguluje minimalny czas martwy ( okresy wyłączenia między dwoma wyjściami ).
W tej funkcji, gdy napięcie na pinie DTC przekroczy napięcie rampy z oscylatora, wymusza na komparatorze wyjściowym wyłączenie tranzystorów Q1 i Q2.
Układ scalony ma wewnętrznie ustawiony poziom przesunięcia 110 mV, który gwarantuje minimalny czas martwy wynoszący około 3%, gdy pin DTC jest połączony z linią uziemiającą.
Czas martwy można zwiększyć, przykładając zewnętrzne napięcie do styku nr 4 kodu DTC. Pozwala to na liniową kontrolę funkcji czasu martwego od domyślnych 3% do maksymalnie 100%, poprzez zmienne wejście od 0 do 3,3 V.
Jeśli używana jest regulacja pełnego zakresu, wyjściową puszkę układu scalonego można regulować za pomocą napięcia zewnętrznego bez zakłócania konfiguracji wzmacniacza błędu.
Funkcja czasu martwego może być wykorzystywana w sytuacjach, w których konieczna jest dodatkowa kontrola nad cyklem pracy wyjścia.
Aby jednak zapewnić prawidłowe działanie, należy upewnić się, że to wejście jest zakończone do poziomu napięcia lub do masy i nigdy nie powinno być pozostawione bez napięcia.
Wzmacniacze błędów
Dwa wzmacniacze błędów układu scalonego mają wysokie wzmocnienie i są polaryzowane przez szynę zasilającą układów scalonych VI. Umożliwia to wspólny zakres sygnału wejściowego od -0,3 V do VI - 2 V.
Oba wzmacniacze błędu są wewnętrznie skonfigurowane do pracy jak pojedyncze wzmacniacze z pojedynczym zasilaniem, przy czym każde wyjście ma tylko moc aktywną o wysokiej mocy. Dzięki tej zdolności wzmacniacze są w stanie aktywować się niezależnie w celu zaspokojenia zawężającego się zapotrzebowania na PWM.
Ponieważ wyjścia dwóch wzmacniaczy błędów są powiązane jak Bramy OR w węźle wejściowym komparatora PWM dominuje wzmacniacz, który może pracować z minimalnym impulsem na wyjściu.
Wzmacniacze mają spolaryzowane wyjścia z niskoprądowym ujściem, dzięki czemu wyjście IC zapewnia maksymalne PWM, gdy wzmacniacze błędu są w trybie niefunkcjonalnym.
Wejście sterujące wyjściem
Ten pin układu scalonego można skonfigurować tak, aby umożliwić wyjście układu scalonego albo pracę w trybie single-ended, w którym oba wyjścia oscylują razem równolegle lub w trybie push pull wytwarzając naprzemiennie oscylujące wyjścia.
Kołek sterujący wyjściem działa asynchronicznie, umożliwiając bezpośrednią kontrolę nad wyjściem układu scalonego, bez wpływu na stopień wewnętrznego oscylatora lub stopień sterowania impulsowego przerzutnika.
Ten pin jest zwykle skonfigurowany ze stałym parametrem zgodnie ze specyfikacją aplikacji. Na przykład, jeśli wyjścia IC mają pracować równolegle lub pojedynczo, pin sterujący wyjściem jest połączony na stałe z linią uziemienia. Z tego powodu etap sterowania impulsowego wewnątrz układu scalonego zostaje wyłączony, a alternatywny przerzutnik zatrzymuje się na pinach wyjściowych.
Ponadto w tym trybie impulsy docierające do regulacji czasu martwego i komparatora PWM są przenoszone razem przez oba tranzystory wyjściowe, umożliwiając równoległe włączanie / wyłączanie wyjścia.
Aby uzyskać operację wyjścia typu push-pull, pin sterujący wyjściem musi być po prostu podłączony do styku odniesienia wyjścia +5 V (REF) układu scalonego. W tym stanie każdy z tranzystorów wyjściowych włącza się naprzemiennie poprzez stopień przerzutnika sterującego impulsem.
Tranzystory wyjściowe
Jak widać na drugim schemacie od góry, układ składa się z dwóch tranzystorów wyjściowych, które mają niezatwierdzone zaciski emitera i kolektora.
Oba te bezpotencjałowe zaciski są przystosowane do poboru (odbioru) lub źródła (wyjścia) do 200 mA prądu.
Punkt nasycenia tranzystorów jest mniejszy niż 1,3 V, gdy są skonfigurowane w trybie wspólnego emitera i mniej niż 2,5 V w trybie wspólny kolektor tryb.
Są wewnętrznie chronione przed zwarciem i przetężeniem.
Obwody aplikacji
Jak wyjaśniono powyżej, TL494 jest głównie układem scalonym kontrolera PWM, dlatego główne obwody aplikacji to głównie obwody oparte na PWM.
Poniżej omówiono kilka przykładowych obwodów, które można modyfikować na różne sposoby zgodnie z indywidualnymi wymaganiami.
Ładowarka słoneczna wykorzystująca TL494
Poniższy projekt pokazuje, jak można efektywnie skonfigurować TL494 do tworzenia przełączanego zasilacza buck 5 V / 10 A.
W tej konfiguracji wyjście pracuje równolegle, dlatego widzimy, że pin nr 13 sterujący wyjściem jest podłączony do masy.
Również tutaj dwa wzmacniacze błędów są używane bardzo wydajnie. Jeden wzmacniacz błędu steruje sprzężeniem zwrotnym napięcia za pośrednictwem R8 / R9 i utrzymuje stałą wartość wyjściową na żądanym poziomie (5 V)
Drugi wzmacniacz błędu jest używany do sterowania maksymalnym prądem przez R13.

Falownik TL494
Oto klasyczny obwód falownika zbudowany wokół IC TL494. W tym przykładzie wyjście jest skonfigurowane do pracy w trybie przeciwsobnym, dlatego pin sterujący wyjściem jest tutaj połączony z napięciem odniesienia + 5 V, co jest uzyskiwane z pinu # 14. Pierwsza z pinów jest również skonfigurowana dokładnie tak, jak opisano w powyższym arkuszu danych.

Wniosek
IC TL494 to układ scalony sterowania PWM z bardzo dokładnymi wyjściami i funkcjami kontroli sprzężenia zwrotnego, zapewniającymi idealną kontrolę impulsów dla dowolnej aplikacji obwodu PWM.
To jest podobne do SG3525 na wiele sposobów i może być używany jako skuteczny zamiennik, chociaż numery pinów mogą być różne i nie do końca zgodne.
Jeśli masz jakieś pytania dotyczące tego układu scalonego, nie wahaj się zadać ich za pośrednictwem poniższych komentarzy, chętnie pomogę!
Odniesienie: Arkusz danych TL494
Poprzedni: Zrozumienie procesu włączania MOSFET Dalej: Rodzaje płyt Arduino ze specyfikacjami