
Serwo oznacza sterowanie sprzężeniem zwrotnym z wykrywaniem błędów, które jest wykorzystywane do korygowania działania systemu. Wymaga również generalnie wyrafinowanego sterownika, często dedykowanego modułu zaprojektowanego specjalnie do użytku z siłownikami. Silniki serwo to silniki prądu stałego, które pozwalają na precyzyjną kontrolę położenia kątowego. Są to silniki prądu stałego, których prędkość jest powoli obniżana przez przekładnie. Serwomotory mają zwykle obrót odcięty od 90 ° do 180 °. Kilka serwomotorów ma również odcięcie obrotu o 360 ° lub więcej. Ale serwomotory nie obracają się stale. Ich obrót jest ograniczony między stałymi kątami.
Serwomotor to zespół czterech rzeczy: normalnego silnika prądu stałego, reduktora przekładni, urządzenia wykrywającego położenie i obwodu sterującego. Silnik prądu stałego jest połączony z mechanizmem przekładniowym, który zapewnia sprzężenie zwrotne z czujnikiem położenia, którym jest najczęściej potencjometr. Ze skrzyni biegów moc silnika jest dostarczana przez wielowypust serwa do ramienia serwa. W przypadku standardowych serwomotorów przekładnia jest zwykle wykonana z tworzywa sztucznego, podczas gdy w przypadku serwomotorów dużej mocy jest ona wykonana z metalu.
Silnik serwo składa się z trzech przewodów - czarnego przewodu podłączonego do masy, przewodu biało-żółtego podłączonego do jednostki sterującej oraz przewodu czerwonego podłączonego do zasilacza.
Zadaniem serwomotoru jest odbieranie sygnału sterującego, który reprezentuje pożądane położenie wyjściowe wału serwomechanizmu i dostarczanie mocy do jego silnika prądu stałego, aż jego wał obróci się do tego położenia.
Wykorzystuje urządzenie wykrywające położenie, aby określić położenie obrotowe wału, dzięki czemu wie, w którą stronę musi się obrócić silnik, aby przesunąć wał do zadanej pozycji. Wał zwykle nie obraca się swobodnie wokół silnika na prąd stały, ale może po prostu obrócić się o 200 stopni.

Siłownik
Z pozycji wirnika powstaje wirujące pole magnetyczne, które wydajnie generuje toczek. Prąd płynie w uzwojeniu, tworząc wirujące pole magnetyczne. Wał przekazuje moc wyjściową silnika. Obciążenie jest przenoszone przez mechanizm przenoszący. Wysokowydajne metale ziem rzadkich lub inny magnes trwały jest umieszczony na zewnątrz wału. Enkoder optyczny zawsze obserwuje liczbę obrotów i położenie wału.
Działanie serwomotoru
Silnik serwo składa się z silnika prądu stałego, przekładni, czujnika położenia i obwodu sterującego. Silniki prądu stałego są zasilane z akumulatora i pracują z dużą prędkością i niskim momentem obrotowym . Zespół przekładni i wału podłączony do silników prądu stałego obniża tę prędkość do wystarczającej prędkości i wyższego momentu obrotowego. Czujnik położenia wykrywa położenie wału od jego określonego położenia i przekazuje informacje do obwodu sterującego. Obwód sterujący odpowiednio dekoduje sygnały z czujnika położenia i porównuje rzeczywiste położenie silników z żądanym położeniem i odpowiednio steruje kierunkiem obrotu silnika prądu stałego, aby uzyskać żądane położenie. Silnik serwo generalnie wymaga zasilania prądem stałym od 4,8 V do 6 V.
Sterowanie serwomotorem
Sterowanie serwomotorem odbywa się poprzez sterowanie jego położeniem za pomocą techniki modulacji szerokości impulsu. Szerokość impulsu przyłożonego do silnika jest zmieniana i wysyłana przez ustalony czas.
Szerokość impulsu określa kątowe położenie serwomotoru. Na przykład szerokość impulsu 1 ms powoduje położenie kątowe 0 stopni, podczas gdy szerokość impulsu 2 ms powoduje szerokość kątową 180 stopni.
Zalety:
- Jeśli silnik zostanie obciążony dużym obciążeniem, sterownik zwiększy prąd do cewki silnika, próbując obrócić silnik. Nie ma stanu poza krokiem.
- Możliwa jest praca z dużą prędkością.
Niedogodności:
- Ponieważ serwomotor próbuje obracać się zgodnie z impulsami polecenia, ale opóźnia się, nie nadaje się do precyzyjnego sterowania obrotami.
- Wyższy koszt.
- Po zatrzymaniu wirnik silnika kontynuuje ruch w przód iw tył o jeden impuls, więc nie jest odpowiedni, jeśli chcesz zapobiec wibracjom
7 Zastosowania serwomotorów
Serwomotory są używane w zastosowaniach wymagających szybkich zmian prędkości bez przegrzania silnika.
- W przemyśle są wykorzystywane w obrabiarkach, pakowaniu, automatyzacji fabryk, obróbce materiałów, przetwarzaniu druku, liniach montażowych i wielu innych wymagających zastosowaniach w robotyce, maszynach CNC lub automatycznej produkcji.
- Są również wykorzystywane w samolotach sterowanych radiowo do sterowania położeniem i ruchem wind.
- Znajdują zastosowanie w robotach ze względu na ich płynne włączanie i wyłączanie oraz dokładne pozycjonowanie.
- Są również używane w przemyśle lotniczym do utrzymywania płynu hydraulicznego w ich układach hydraulicznych.
- Są używane w wielu zabawkach sterowanych radiowo.
- Są używane w urządzeniach elektronicznych, takich jak odtwarzacze DVD lub Blue-ray Disc do rozszerzania lub odtwarzania tac dysków.
- Są również używane w samochodach do utrzymywania prędkości pojazdów.
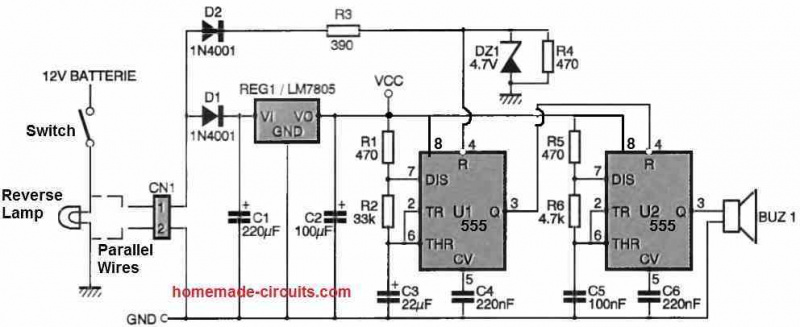
Obwód aplikacji serwomotoru
Z poniższego obwodu aplikacji: Każdy silnik ma trzy wejścia: VCC, masę i okresowy sygnał prostokątny. Szerokość impulsu fali prostokątnej określa prędkość i kierunek serwomotorów. W naszym przypadku wystarczy zmienić kierunek, aby umożliwić urządzeniu poruszanie się do przodu, do tyłu oraz skręcanie w lewo iw prawo. Jeśli szerokość impulsu jest poniżej określonej ramy czasowej, silnik będzie poruszał się zgodnie z ruchem wskazówek zegara. Jeśli szerokość impulsu przekroczy ten przedział czasu, silnik będzie poruszał się w kierunku przeciwnym do ruchu wskazówek zegara. Środkowy przedział czasu można regulować za pomocą potencjometru wbudowanego w silnik.

3 różnice między silnikiem krokowym a serwomotorem:
- Silniki krokowe mają dużą liczbę biegunów, par magnetycznych generowanych przez magnes trwały lub prąd elektryczny. Serwosilniki mają bardzo mało biegunów, każdy biegun stanowi naturalny punkt zatrzymania wału silnika.
- Moment obrotowy silnika krokowego przy niskich prędkościach jest większy niż serwomotoru tej samej wielkości.
- Praca silnika krokowego jest synchronizowana za pomocą sygnałów impulsowych poleceń wysyłanych z generatora impulsów. Natomiast działanie serwomotoru opóźnia się w stosunku do impulsów poleceń.
Masz już pomysł jak działa serwomiernik, jeśli masz jakieś pytania na ten temat lub projekty elektryczne i elektroniczne zostaw komentarz poniżej.
Kredyt zdjęciowy
- Servo Motor wg Wikimedia







{kind=link}