W poście omówiono prosty obwód zdalnego sterowania helikopterem RC wykorzystujący moduły RF 433 kHz, bez żadnego mikrokontrolera lub skomplikowanych implementacji joysticka.
Pomysł został zgłoszony przez pana Jitendrę.
Cele i wymagania obwodu
- Robię helikopter RC na dużą skalę. W którym używam 4 silników. Dla pierwszego głównego silnika 12 V: mechanizm polega na tym, że chcę, aby jego prędkość była kontrolowana za pomocą przycisku kontrolera na pilocie, od 0 do pełnej prędkości.
- Dla silników 2-giego 3 V: jego mechanizm służy tylko do obracania do przodu i do tyłu z indywidualnym kluczem na pilocie dla każdego silnika, ponieważ będzie obsługiwał tarcze krzywkowe wirników.
- Dla trzeciego silnika tylnego 9v: powinien być ustawiony na prędkość równowagową za pomocą regulatora na tablicy odbiorczej helikoptera, abym mógł ręcznie regulować prędkość, aby zatrzymać helikopter ... przed obracaniem się wraz z wirnikami, a na zdalnym byłoby spowolnienie i przyspieszenie silnika z jego równowagi.
- Moc wejściowa na płytce odbiornika wynosiłaby 12 V, a prąd 8-10 amperów. Powinien mieć zasięg 500–800 metrów. Proszę pana, czy mógłby pan zaprojektować taką płytkę RC wraz z pilotem.
- Poszukuję takiej płytki drukowanej od dwóch lat.
- Mój projekt został zatrzymany z powodu jego braku. Proszę pana, pomóż mi. Dla własnej wygody można zaprojektować dwie oddzielne płytki obwodów rc, jedną dla silnika głównego i silnika tylnego, a drugą dla dwóch silników obracających się do przodu i do tyłu.
- Ale prąd wejściowy i różnica potencjałów w obu obwodach powinny być takie same, z tym samym zasięgiem, czyli 500-800 metrów z pilotami lub zdalnymi. Proszę również podać nazwę składników wymaganych wraz z numeracją.
Projektowanie
Wymagane moduły obwodów, które są wymagane do budowy proponowanego helikoptera RC to:
1) Regulator prędkości 12 V PWM
2) Obwód kontrolera biegu wstecznego silnika 3 V do przodu.
3) regulator silnika 9 V z obwodem regulatora zmiennej prędkości.
Wszystkie powyższe specyfikacje muszą być kontrolowane za pomocą dalekiego zasięgu 433 MHz Moduł zdalnego sterowania RF .
Żądany moduł zdalny 433 MHz RF można nabyć w dowolnym sklepie internetowym lub w najbliższym sklepie elektronicznym. Zasięg pilota powinien być zgodny z wymaganymi specyfikacjami dla śmigłowca RC, tutaj powinien wynosić 1 km.
Do omawianego obwodu zdalnego sterowania helikopterem RC potrzebny byłby 6-kanałowy moduł zdalnego sterowania RF, dokładnie podobny do tego, który był używany w naszym wcześniejszym najprostszy obwód zdalnego sterowania dronem .
Obraz tego samego można zobaczyć poniżej:

Zielona tablica po lewej stronie to moduł zdalnego odbiornika z sześcioma przekaźnikami sterującymi, który musi być zainstalowany wewnątrz helikoptera RC w celu wykonania niezbędnych operacji sterowania.
Prawa jednostka boczna to pilot nadajnika, który powinien być trzymany przez użytkownika, a odpowiednie przyciski są naciskane w celu wysłania do płytki przekaźników odpowiednich informacji sterujących ruchem.
Teraz zobaczmy, jak sześć przekaźników należy skonfigurować z różnymi obwodami PWM i zainstalować wewnątrz choppera RC, na podstawie następujących szczegółów:
Pamiętaj, że styki przekaźnika pokazane na płytce odbiornika są domyślnie puste, co oznacza, że ich styki rozwierne i rozwierne nie są okablowane i muszą być okablowane zgodnie z poniższymi schematami.
Zgodnie z żądaniem, prędkość silnika 9 V i silnika 12 V muszą być kontrolowane przez kolejne naciśnięcie pilota. Poniżej przedstawiono obwody służące do implementacji tej funkcji:
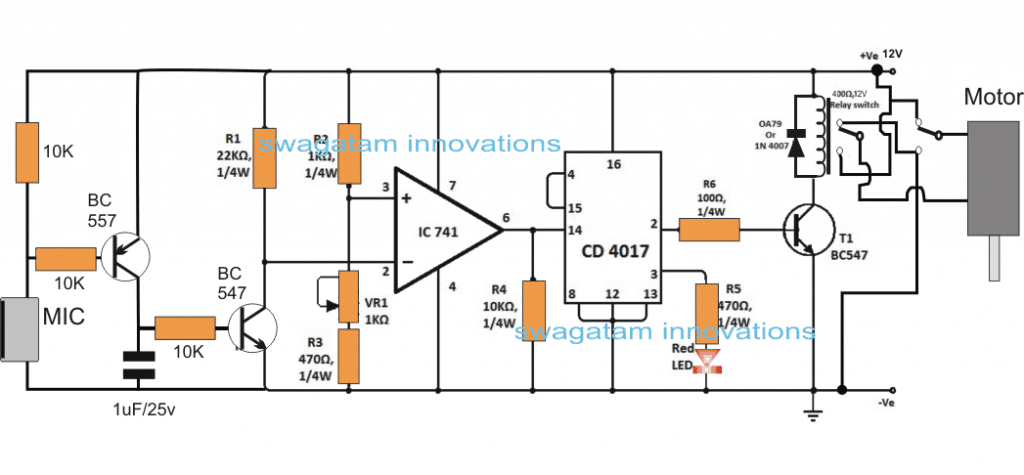
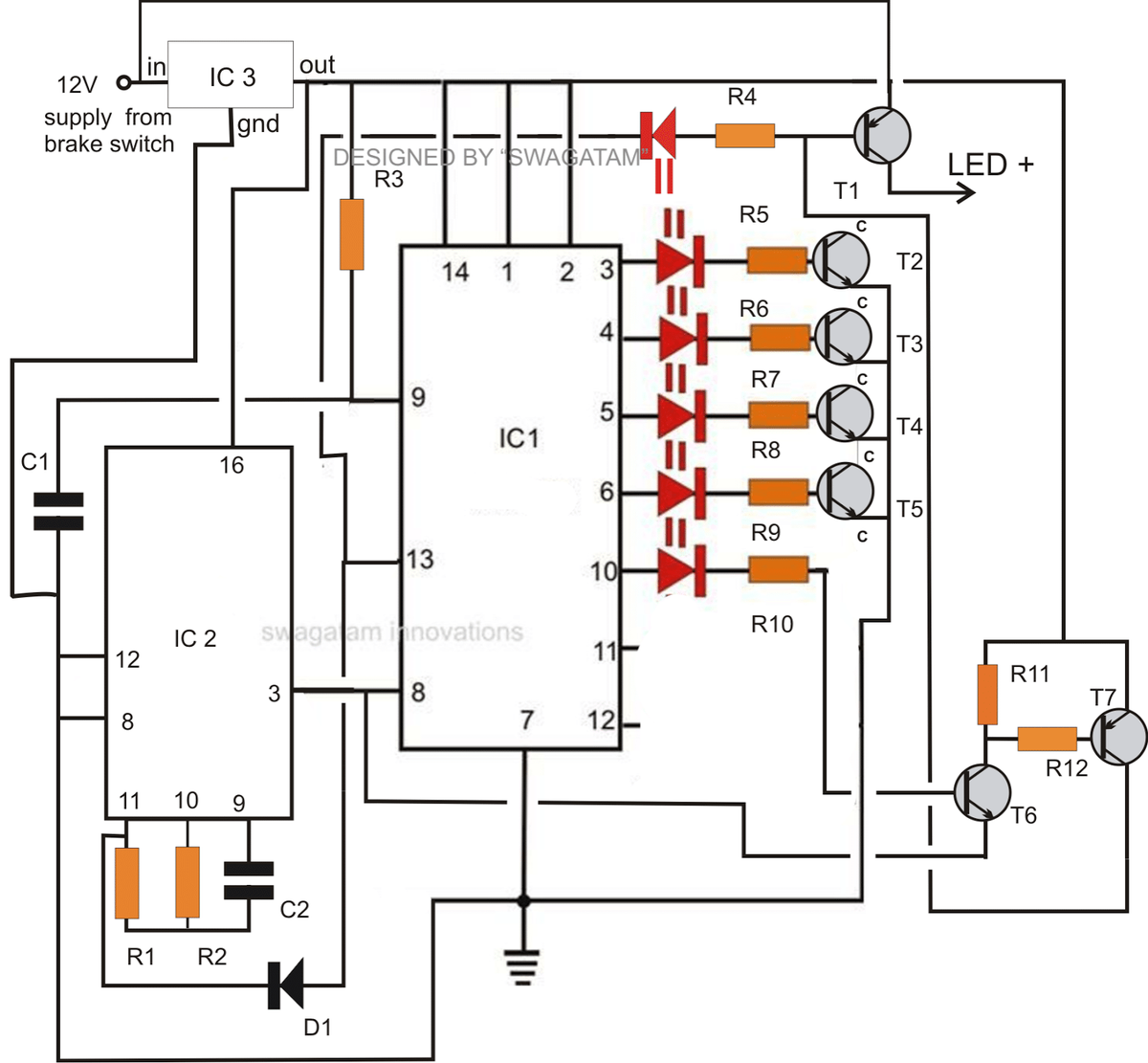
Schemat sterownika silnika


Działanie obwodu
Jak widać na schematach, kilka identycznych Obwody IC 555 PWM są zatrudnieni w tym celu. Cztery z sześciu przekaźników są tutaj włączone, a ich odpowiednie styki są podłączone do pokazanych połączeń.
W projekcie IC 555 jest ustawiony jako podstawowy obwód astabilny, przypisane do oscylacji z określoną częstotliwością w zależności od wartości jego składników R1, R2 i C. .
Popychacz napięcia w postaci układu IC 741 jest skonfigurowany ze stykiem sterującym # 5 układu IC 555 w celu zmiany zawartości PWM na pinie # 3 układu IC 555 zgodnie ze wskazanymi działaniami przekaźnika.
Napięcie na styku nr 3 układu IC 741 jest śledzone lub przenoszone na styku nr 6, a następnie do styku nr 5 układu IC 555. W zależności od poziomu naładowania kondensatora styku nr 3 to zmienne napięcie może znajdować się w dowolnym miejscu między granicą napięcia zasilania a zero.
Poziom naładowania kondensatora jest zmieniany lub zmieniany, po prostu ładując go lub rozładowując poprzez aktywację odpowiedniego styku przekaźnika. Aby naładować, górny styk przekaźnika jest zamknięty lub aktywowany, umożliwiając wzrost napięcia na pinie # 5 układu IC 555, podczas gdy aktywacja dolnych styków przekaźnika rozładowuje kondensator, powodując pojawienie się proporcjonalnie niższego napięcia na pinie # 5 układu IC 555.
Powyższe działania przekładają wyniki pin # 3 na odpowiednio zmieniające się PWM, co z kolei powoduje, że silnik pracuje szybciej lub wolniej.
W silniku 9 V można zobaczyć szereg diod przymocowanych do emitera tranzystora sterownika, co zapewnia wymagany spadek napięcia i pomaga przekształcić napięcie 12 V w około 10 V regulowane zasilanie zgodnie ze specyfikacją silnika.
Praca do przodu silnika 3V do tyłu
Trzecie i ostatnie żądanie w żądaniu dotyczy rozszerzenia sterowanie do tyłu / do przodu silnika 3V za pomocą przycisku pilota nadajnika RF nacisnąć.
Pozostałe dwa przekaźniki mogą być teraz używane do tego konkretnego wykonania i jest to zrobione w sposób pokazany na poniższym schemacie:

Tutaj również stosujemy wszechstronny IC 555 okablowany jako precyzyjny obwód generatora PWM. PWM jest odpowiednio ustawiane poprzez ustawienie wstępne 5K przed zakończeniem instalacji tak, aby prędkość silnika była idealnie dostosowana do wymaganej równowagi helikoptera.
Przekaźniki można zobaczyć po prostu okablowane, aby wymusić wymagany ruch do tyłu i do przodu lub zgodnie z ruchem wskazówek zegara lub przeciwnie do ruchu wskazówek zegara w odpowiedzi na przełączenie sparowanego styku przekaźnika, który razem tworzy przekaźnik DPDT.
Aby zapobiec zwarciu, korzystnie moduł odbiornika powinien być zmodyfikowany dla tych dwóch przekaźników w taki sposób, że naciśnięcie któregokolwiek z przycisków powoduje, że oba przekaźniki aktywują się razem, a raczej tan, w zależności od tego, czy dwa przełączniki zostaną zsynchronizowane w celu aktywacji.
Można oczekiwać, że to przełączanie spowoduje odwrócenie obrotów silnika w przeciwnym kierunku, umożliwiając użytkownikowi natychmiastowe wykonanie wymaganych zmian kierunku w helikopterze RC.
Na tym kończy się instrukcja dotycząca obwodu i okablowania przekaźnika dla proponowanego obwodu zdalnego sterowania helikoptera RC. W przypadku dalszych wątpliwości prosimy o wyrażenie ich w komentarzach.
Poprzedni: Obwód przełącznika ultradźwiękowego inteligentnego automatycznego włączania / wyłączania Dalej: Pojedynczy obwód wzmacniacza mocy MOSFET klasy A.