Zastosowanie PWM jako techniki przełączania
Modulacja szerokości impulsu (PWM) to powszechnie stosowana technika ogólnego sterowania zasilaniem prądem stałym urządzenia elektrycznego, praktyczna dzięki zastosowaniu nowoczesnych elektronicznych przełączników mocy. Jednak znajduje swoje miejsce również w śmigłowcach AC. Średnia wartość prądu dostarczanego do obciążenia jest kontrolowana przez położenie przełącznika i czas jego trwania. Jeśli okres włączenia przełącznika jest dłuższy w porównaniu z okresem wyłączenia, obciążenie otrzymuje stosunkowo większą moc. Dlatego częstotliwość przełączania PWM musi być szybsza.
Zazwyczaj przełączanie musi być wykonywane kilka razy na minutę w kuchence elektrycznej, 120 Hz w ściemniaczu lamp, od kilku kiloherców (kHz) do kilkudziesięciu kHz w przypadku napędu silnikowego. Częstotliwość przełączania dla wzmacniaczy audio i zasilaczy komputerowych wynosi około dziesięciu do setek kHz. Stosunek czasu włączenia do okresu czasu impulsu nazywany jest cyklem pracy. Jeśli cykl pracy jest niski, oznacza to małą moc.
Straty mocy w łączniku są bardzo małe, ze względu na prawie znikomą ilość prądu płynącego w stanie wyłączonym urządzenia i znikomą wielkość spadku napięcia w stanie wyłączonym. Sterowanie cyfrowe również wykorzystuje technikę PWM. PWM był również używany w niektórych systemach komunikacyjnych, w których jego cykl pracy był używany do przekazywania informacji przez kanał komunikacyjny.

PWM można wykorzystać do regulacji całkowitej ilości mocy dostarczanej do obciążenia bez strat zwykle występujących, gdy transfer mocy jest ograniczony środkami rezystancyjnymi. Wadą są pulsacje określone przez cykl pracy, częstotliwość przełączania i właściwości obciążenia. Przy dostatecznie wysokiej częstotliwości przełączania i, w razie potrzeby, przy użyciu dodatkowych pasywnych filtrów elektronicznych, można wygładzić ciąg impulsów i odzyskać średni przebieg analogowy. Systemy sterowania PWM wysokiej częstotliwości można łatwo wdrożyć za pomocą przełączników półprzewodnikowych.
Jak już wspomniano powyżej, prawie żadna moc nie jest rozpraszana przez przełącznik w stanie włączonym lub wyłączonym. Jednak podczas przejść między stanami włączenia i wyłączenia zarówno napięcie, jak i prąd są niezerowe, a zatem znaczna moc jest rozpraszana w przełącznikach. Na szczęście zmiana stanu między pełnym włączeniem a całkowitym wyłączeniem jest dość szybka (zwykle mniej niż 100 nanosekund) w stosunku do typowych czasów włączania i wyłączania, a więc średnie rozpraszanie mocy jest dość niskie w porównaniu z dostarczaną mocą, nawet przy wysokich częstotliwościach przełączania są używane.
Wykorzystanie PWM do dostarczania prądu stałego do obciążenia
Większość procesów przemysłowych wymaga działania z określonymi parametrami, jeśli chodzi o prędkość napędu. Elektryczne układy napędowe używane w wielu zastosowaniach przemysłowych wymagają wyższej wydajności, niezawodności i zmiennej prędkości ze względu na łatwość sterowania. Plik kontrola prędkości silnika prądu stałego jest ważny w zastosowaniach, w których liczy się precyzja i ochrona. Zadaniem regulatora prędkości silnika jest pobranie sygnału reprezentującego wymaganą prędkość i napędzanie silnika z tą prędkością.
Modulacja szerokości impulsu (PWM), tak jak ma to zastosowanie do sterowania silnikiem, jest sposobem dostarczania energii za pomocą szeregu impulsów, a nie w sposób ciągły (analogowy). Zwiększając lub zmniejszając szerokość impulsu, sterownik reguluje przepływ energii do wału silnika. Indukcyjność własna silnika działa jak filtr, magazynując energię podczas cyklu „ON”, jednocześnie uwalniając ją z prędkością odpowiadającą sygnałowi wejściowemu lub referencyjnemu. Innymi słowy, energia przepływa do obciążenia nie tyle przy częstotliwości przełączania, co przy częstotliwości odniesienia.
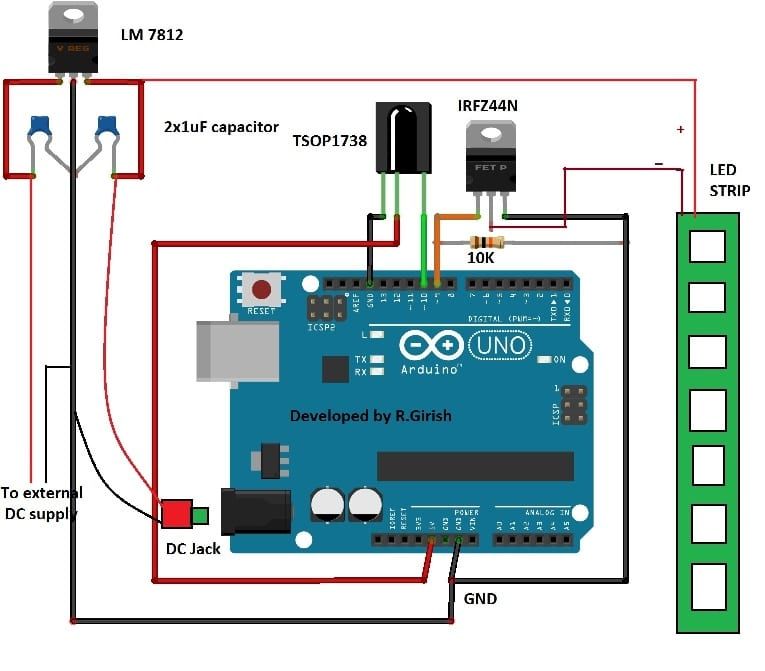
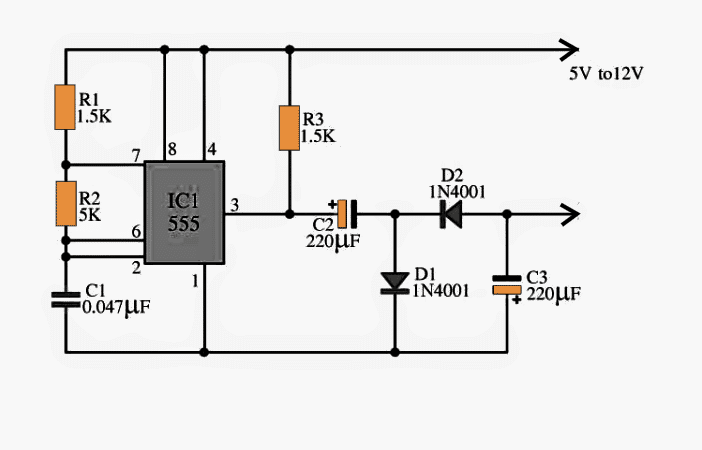
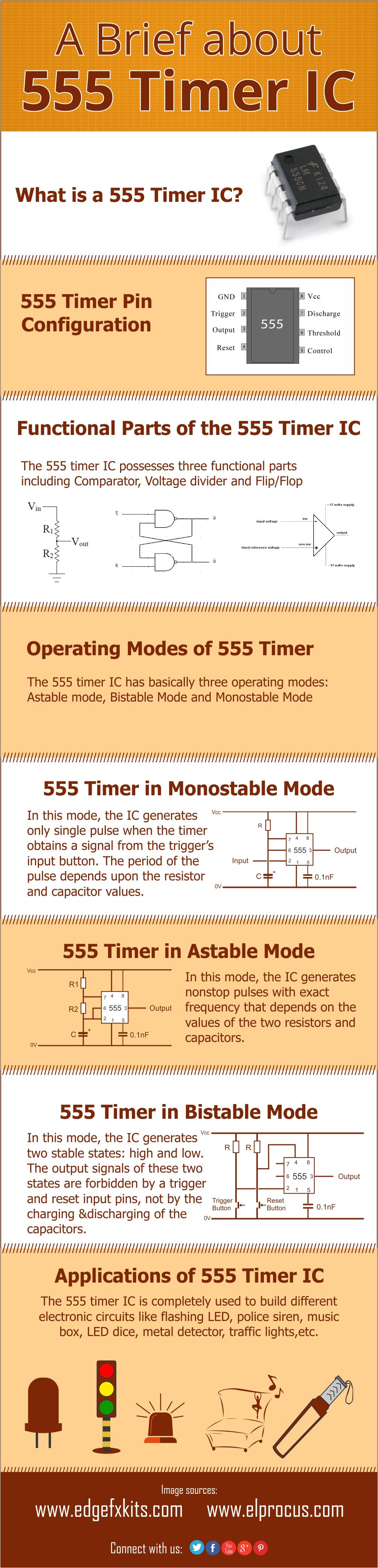
Obwód służy do sterowania prędkością Silnik prądu stałego za pomocą techniki PWM. Sterownik silnika prądu stałego o zmiennej prędkości serii 12 V wykorzystuje układ scalony z zegarem 555 jako generator impulsów PWM do regulacji prędkości silnika 12 V DC. IC 555 to popularny układ czasowy używany do tworzenia obwodów czasowych. Został wprowadzony w 1972 roku przez Signetics. Nazywa się to 555, ponieważ wewnątrz znajdują się trzy rezystory 5 K. Układ scalony składa się z dwóch komparatorów, łańcucha rezystorów, przerzutnika i stopnia wyjściowego. Pracuje w 3 podstawowych trybach - Astable, Monostable (gdzie działa jako generator impulsów typu one shot i Bistable), to znaczy po wyzwoleniu wyjście przechodzi w stan wysoki przez okres w oparciu o wartości rezystora czasowego i kondensatora. Tryb Astable (AMV), układ scalony działa jako swobodnie działający multiwibrator. Wyjście zmienia się w sposób ciągły na wysokie i niskie, aby zapewnić pulsacyjne wyjście jako oscylator. W trybie bistabilnym, znanym również jako wyzwalacz Schmitta, układ scalony działa jako przerzutnik z wysokim lub niski poziom wyjściowy na każdym wyzwalaniu i resetowaniu.

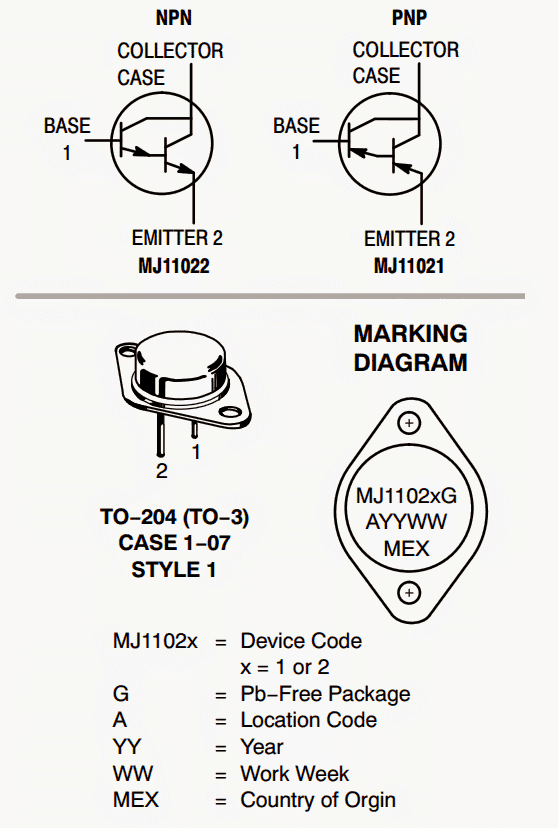
W tym obwodzie zastosowano MOSFET IRF540. To jest tranzystor MOSFET z ulepszeniem kanału N. Jest to zaawansowany tranzystor MOSFET mocy zaprojektowany, przetestowany i gwarantujący wytrzymanie określonego poziomu energii w awaryjnym trybie lawinowym. Te tranzystory MOSFET mocy są przeznaczone do zastosowań, takich jak regulatory przełączające, konwertery przełączające, sterowniki silników, sterowniki przekaźników i sterowniki do bipolarnych tranzystorów przełączających dużej mocy wymagających dużej prędkości i małej mocy napędu bramki. Te typy mogą być obsługiwane bezpośrednio z układów scalonych. Napięcie robocze tego obwodu można dostosować do potrzeb napędzanego silnika prądu stałego. Ten obwód może działać przy 5-18VDC.
Powyżej obwodu tj. Sterowanie prędkością silnika prądu stałego przez PWM technika zmienia cykl pracy, który z kolei steruje prędkością silnika. IC 555 jest podłączony w swobodnie działającym multi wibratorze w trybie astabilnym. Obwód składa się z układu potencjometru i dwóch diod, które służą do zmiany cyklu pracy i utrzymania stałej częstotliwości. Ponieważ rezystancja zmiennego rezystora lub potencjometru zmienia się, cykl roboczy impulsów przyłożonych do tranzystora MOSFET zmienia się i odpowiednio zmienia się moc prądu stałego do silnika, a tym samym jego prędkość wzrasta wraz ze wzrostem cyklu pracy.
Wykorzystanie PWM do dostarczania zasilania AC do obciążenia
Nowoczesne przełączniki półprzewodnikowe, takie jak tranzystory MOSFET lub tranzystory bipolarne z izolowaną bramką (IGBT), są dość idealnymi elementami. W ten sposób można zbudować sterowniki o wysokiej wydajności. Zwykle przetwornice częstotliwości używane do sterowania silnikami prądu przemiennego mają sprawność lepszą niż 98%. Zasilacze impulsowe mają niższą sprawność ze względu na niskie poziomy napięcia wyjściowego (często potrzebne są nawet poniżej 2 V dla mikroprocesorów), ale nadal można osiągnąć sprawność powyżej 70-80%.

Ten rodzaj sterowania dla prądu przemiennego jest metodą znanego mocy z opóźnionym kątem wystrzału. Jest tańszy i generuje dużo szumów elektrycznych i harmonicznych w porównaniu z rzeczywistym sterowaniem PWM, które generuje pomijalne szumy.
W wielu zastosowaniach, takich jak ogrzewanie przemysłowe, sterowanie oświetleniem, silniki indukcyjne z łagodnym rozruchem i regulatory prędkości wentylatorów i pomp, wymagane jest zmienne napięcie AC ze stałego źródła prądu przemiennego. Kontrola kąta fazowego regulatorów jest szeroko stosowana do tych wymagań. Oferuje pewne zalety, takie jak prostota i możliwość ekonomicznego kontrolowania dużej ilości energii. Jednak opóźniony kąt wyzwalania powoduje nieciągłość i dużą liczbę harmonicznych w prądzie obciążenia, a po stronie prądu przemiennego pojawia się opóźniony współczynnik mocy, gdy kąt wyzwalania wzrasta.
Te problemy można rozwiązać za pomocą przerywacza PWM AC. Ten przerywacz PWM AC oferuje kilka zalet, takich jak sinusoidalny prąd wejściowy przy współczynniku mocy bliskim jedności. Jednak aby zmniejszyć rozmiar filtra i poprawić jakość regulatora mocy, należy zwiększyć częstotliwość przełączania. Powoduje to duże straty przy przełączaniu. Innym problemem jest komutacja między przełącznikiem przenoszącym S1 a przełącznikiem swobodnym S2. Powoduje to skok prądu, jeśli oba przełączniki są włączone w tym samym czasie (zwarcie), a skok napięcia, jeśli oba przełączniki są wyłączone (brak ścieżki swobodnej). Aby uniknąć tych problemów, zastosowano tłumik RC. Zwiększa to jednak straty mocy w obwodzie i jest trudne, kosztowne, nieporęczne i nieefektywne w zastosowaniach o dużej mocy. Zaproponowano przerywacz prądu przemiennego z przełączaniem napięcia prądu zerowego (ZCS-ZVS). Jego regulator napięcia wyjściowego musi zmieniać czas wyłączenia sterowany sygnałem PWM. W związku z tym wymagane jest zastosowanie sterowania częstotliwością w celu uzyskania miękkiego przełączania, a ogólne systemy sterowania wykorzystują techniki PWM wytwarzające czas włączenia. Technika ta ma zalety, takie jak proste sterowanie za pomocą modulacji sigma-delta i ciągłość prądu wejściowego. Poniżej przedstawiono cechy proponowanej konfiguracji obwodu i wzorców przerywanych PWM.