W tej części artykułu poznajemy nowatorską metodę przetwarzania mechanizmu naciskania pedałów w pojazdach elektrycznych na odpowiednio zmienny sygnał elektryczny, który może być dalej wykorzystany do przetwarzania sterowania prędkością pojazdu.
Wyjaśniona koncepcja będzie działać jak elektroniczny akcelerator, który będzie zwiększał prędkość pojazdu liniowo wraz ze stopniowym wciskaniem pedału i odwrotnie, wykorzystując technologię PWM.
Pomysł został zgłoszony przez pana Lokesh Maini
Specyfikacja techniczna
Jestem mechanikiem, obecnie pracuję nad pojazdem elektrycznym i chcę kontrolować prędkość mojego silnika za pomocą pedału. nie dostaję kontrolera do mojego silnika, pomóż mi zbudować własny, będę wysoko
wdzięczny
Specyfikacje silnika to 36 woltów, 43 amperów i szczotkowany silnik prądu stałego o mocy 1,5 KM.
Projekt mechaniczny
Elektroniczna wersja pedału przyspieszenia będzie przede wszystkim wymagać mechanizmu, który najpierw przekształca mechaniczne naciśnięcie pedału na odpowiednio zmieniający się sygnał elektryczny, tak aby sygnał ten mógł być przetwarzany przez stopień procesora sygnału w celu pożądanej konwersji na praktyczną kontrolę prędkości pojazd.
Można wypróbować wiele koncepcji, takich jak użycie piezoelektrycznego czujnika obciążenia, pojemnościowego czujnika obciążenia, czujnika rezonansowego itp. W tym artykule nauczymy się znacznie prostszej metody opracowanej przeze mnie, która obejmuje zespół LED / LDR w celu osiągnięcia tego samego .

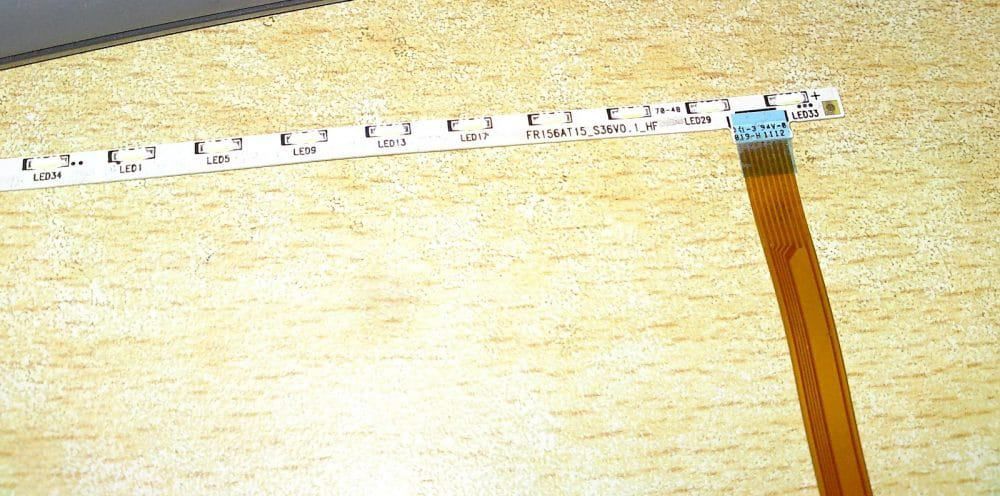
W układzie elektromechanicznym pokazanym na powyższym rysunku możemy zobaczyć następujące zintegrowane komponenty:
Mała przekładnia mocowana za pomocą mechanizmu śrubowego.
Łeb śruby ma białą matową powierzchnię odblaskową
Zespół LED / LDR umieszczony przed łbem śruby.
Jak działa proponowany mechanizm.
Koło zębate pokazane na powyższym rysunku ma być zablokowane innym biegiem o przełożeniu, które może być 10 razy większe niż ten bieg.
Większy bieg musi być skonfigurowany z mechanizmem pedału tak, aby inicjował ruch obrotowy w odpowiedzi na naciśnięcie pedału.
Reakcja obrotowa kół zębatych spowoduje z kolei ruch do przodu łba śruby w poprzek komory, w której znajduje się zespół LED / LDR.
Proces ten spowoduje, że LDR otrzyma proporcjonalnie zmieniającą się ilość światła odbitego z diody LED.
Te zmieniające się dane (w postaci zmieniającego się oporu) odpowiadające wciśnięciu pedału mogą być następnie podawane do obwodu procesora sygnału w celu wymuszenia zamierzonej regulacji prędkości konkretnego pojazdu.
w następny post nauczymy się etapu procesora sygnału przy użyciu techniki PWM.
w powyżej sekcji dowiedzieliśmy się o prostym elektromechanicznym konwerterze do przekształcania działania pedału na proporcjonalnie zmieniający się sygnał elektryczny.
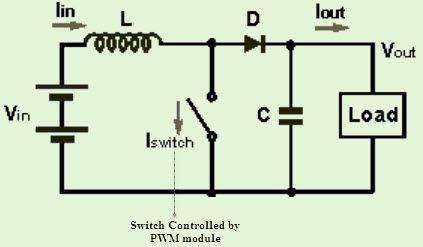
Konwersja działania pedału na PWM
Przyjrzyjmy się teraz implementacji obwodu, który pozwoli nam przekształcić sygnał elektryczny pedału w odpowiednio zmieniający się sygnał PWM dla zamierzonej regulacji prędkości silnika pojazdu.

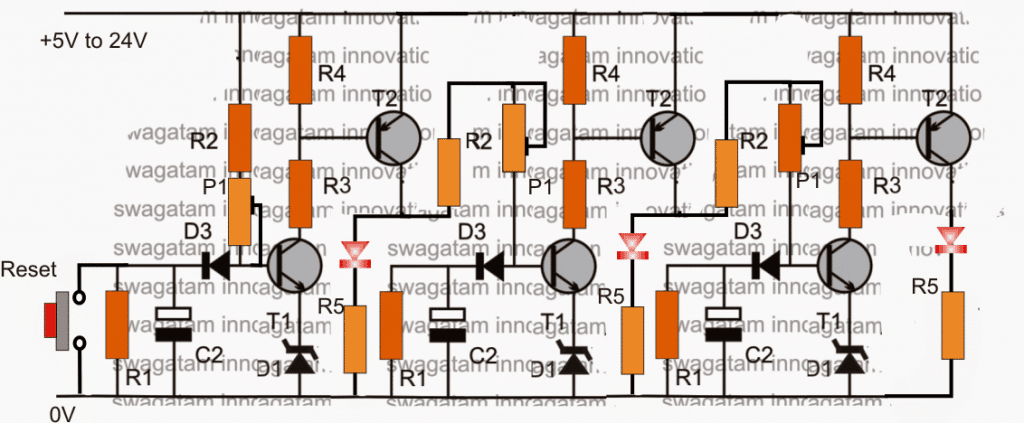
Odnosząc się do powyższego schematu obwodu, możemy ocenić działanie obwodu za pomocą następujących punktów:
IC1 jest skonfigurowany jako generator impulsów 80 Hz z maksymalnym czasem włączenia i minimalnym czasem wyłączenia jako cykl roboczy
IC2 jest skonfigurowany jako komparator, który najpierw przekształca powyższy impuls 80 Hz przyłożony do jego styku 2 z falami trójkątnymi generowanymi na jego styku 6 i porównuje fale trójkątne z napięciem modulującym dostępnym na styku 5.
Napięcie modulujące pin5 jest wyprowadzane z emitera BJT BC547, który jest skonfigurowany jako wspólny kolektor, którego podstawa jest połączona z wejściami LDR uzyskiwanymi z działania pedału.
Zmieniające się rezystancje w odpowiedzi na naciśnięcie pedału są porównywane z ustawieniem wstępnym 100K, a proporcjonalna wielkość napięcia jest wytwarzana u podstawy tranzystora, który przekształca wejście niskiego prądu na równoważny sygnał wysokiego prądu na pinie 5 układu IC2.
Ten chwilowy poziom potencjału jest akceptowany i przetwarzany przez IC2 generując proporcjonalną wielkość sygnałów PWM dla mosfetu i podłączonego silnika.
W ten sposób prędkość silnika jest kontrolowana i zmieniana zgodnie ze zmieniającymi się PWM w odpowiedzi na naciskanie pedałów pojazdu.
Powyższe procedury efektywnie zamieniają działanie pedału na kontrolowane działanie silnika pojazdu i jego prędkości.
Jak skonfigurować obwód.
To jest bardzo łatwe.
- Wciśnij pedał do maksymalnego położenia, tak aby łeb śruby osiągnął możliwie najbliższe położenie przed zespołem LED / LDR.
- Następnie wyreguluj ustawienie 100k, aż pin3 układu IC2 zacznie generować PWM o maksymalnej szerokości, co można potwierdzić mierząc napięcie na pinie3 tak, aby było jak najbliżej napięcia zasilania obwodu, czyli 5V.
- Gdy to nastąpi, można założyć, że procedura konfiguracji została zakończona.
- Wyniki można teraz zweryfikować, naciskając pedał na różnych poziomach i sprawdzając, czy prędkość silnika zmienia się w identyczny sposób.
Poprzedni: Prosty obwód miernika ESR Dalej: Jak zbudować obwód światła do uprawy


![Obwód wskaźnika ciśnienia atmosferycznego [obwód barometru LED]](https://electronics.jf-parede.pt/img/3-phase-power/40/atmospheric-pressure-indicator-circuit-led-barometer-circuit-1.jpg)