Krótkie wprowadzenie do robota:
Robot to każda maszyna w pełni zautomatyzowana, tzn. Samodzielnie uruchamia się, sam decyduje o swoim sposobie pracy i zatrzymuje się. W rzeczywistości jest to replika istoty ludzkiej, która została zaprojektowana w celu zmniejszenia ciężaru ludzkiego. Może być sterowany pneumatycznie lub hydraulicznie lub za pomocą prostych elektronicznych sposobów sterowania. Pierwszym robotem przemysłowym był Unimates zbudowany przez George'a Devola i Joe Engelbergera na przełomie lat 50. i 60.
Każdy robot jest zbudowany na 3 podstawowych prawach zdefiniowanych przez rosyjskiego autora science fiction Izaaka Asimova:
- Robot nie powinien bezpośrednio ani pośrednio szkodzić człowiekowi.
- Robot powinien wykonywać rozkazy ludzi, chyba że i dopóki nie naruszy pierwszego prawa.
- Robot powinien chronić swoje własne istnienie, pod warunkiem, że nie zostaną naruszone pierwsze dwa prawa.

Naprawiony robot
Roboty mogą być robotami stacjonarnymi lub robotami mobilnymi. Roboty mobilne to roboty posiadające mobilną podstawę, która sprawia, że robot porusza się swobodnie w otoczeniu. Jednym z zaawansowanych robotów mobilnych jest Line Follower Robot. Zasadniczo jest to robot, który podąża określoną ścieżką lub trajektorią i decyduje o swoim własnym trybie działania, który oddziałuje na przeszkodę. Ścieżką może być czarna linia na białej podłodze (widoczna) lub pole magnetyczne (niewidoczne). Jego zastosowania zaczynają się od podstawowych zastosowań domowych do zastosowań przemysłowych itp. Obecny stan w przemyśle polega na tym, że przenoszą paczki lub materiały z jednego miejsca w drugie za pomocą systemu dźwigowego. Czasami podnoszenie dużych ciężarów w tym czasie może spowodować pęknięcie podnoszonych materiałów, a także spowoduje uszkodzenie paczek. Kolejne roboty są powszechnie używane do przenoszenia dzieci przez centra handlowe, domy, miejsca rozrywki, zakłady przemysłowe. Korzystanie z podążania za linią pojazd robotyczny to transport materiałów z jednego miejsca do drugiego w przemyśle. Ten ruch robota całkowicie zależy od toru. Robot może zrobić wszystko, co mu powiesz. Podobnie jak w fabrykach, wszystko, co robią, to zrobić robota.

Mobilny robot
Robot śledzący linię
Robot śledzący linię to robot poruszający się po określonej ścieżce kontrolowanej przez mechanizm sprzężenia zwrotnego.
Budowa podstawowego robota śledzącego linię:
Budowanie podstawowego robota Line Follower obejmuje następujące kroki.
- Projektowanie części mechanicznej lub korpusu robota
- Definiowanie kinematyki robotów
- Projektowanie sterowania robotem

Robot popychający linię
Część mechaniczną lub korpus robota można zaprojektować za pomocą programu AutoCAD lub Workspace. Podstawowy robot podążający za linią może składać się z podstawy, na dwóch końcach której zamontowane są koła. Jako podstawę można użyć prostokątnego arkusza twardego tworzywa sztucznego. Ponadto sztywny korpus, taki jak cylinder, może być dodany wraz z innymi kształtami połączonymi ze sobą za pomocą przegubów, a każdy z określonym ruchem w określonym kierunku. Robot Line follower może być robotem mobilnym na kółkach ze stałą podstawą, robotem mobilnym z nogami i wieloma sztywnymi ciałami połączonymi przegubami.
Następnym krokiem jest zdefiniowanie kinematyki robota. Analiza kinematyczna robota polega na opisaniu jego ruchu względem ustalonego układu współrzędnych. Dotyczy to głównie ruchu robota oraz ruchu każdego ciała w przypadku robota z nogami. Zwykle dotyczy dynamiki ruchu robota. Cała trajektoria robota jest wyznaczana za pomocą analizy kinematycznej. Można to zrobić za pomocą oprogramowania Workspace.
Sterowanie robotem jest najważniejszym aspektem jego pracy. Tutaj termin sterowanie odnosi się do sterowania ruchem robota, tj. Sterowania ruchem kół. Podstawowy robot podążający za linią porusza się po określonej ścieżce, a ruch robota wzdłuż tej ścieżki jest kontrolowany przez sterowanie obrotami kół, które są umieszczone na wałach dwóch silników. Tak więc podstawową kontrolę uzyskuje się poprzez sterowanie silnikami. Obwody sterujące obejmują użycie czujników do wykrywania ścieżki i mikrokontroler lub jakiekolwiek inne urządzenie do sterowania pracą silnika poprzez sterowniki silników, oparte na wyjściu czujnika.
2 sposoby sterowania robotem popychającym
- Bez użycia mikrokontrolerów

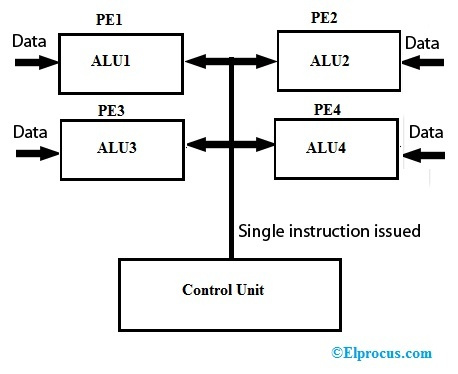
Schemat blokowy systemu sterowania
Składa się z diody LED IR i układu fotodiody dla każdego silnika, który jest kontrolowany przez włączanie i wyłączanie tranzystora.
Dioda IR LED po uzyskaniu odpowiedniego polaryzacji emituje światło podczerwone. To światło podczerwone odbija się w przypadku białej powierzchni, a odbite światło podczerwone pada na fotodiodę. Rezystancja fotodiody maleje, co prowadzi do wzrostu prądu przez nią, a tym samym spadku napięcia na niej. Fotodioda jest podłączona do bazy tranzystora iw wyniku wzrostu napięcia na fotodiodzie tranzystor zaczyna przewodzić, a tym samym silnik podłączony do kolektora tranzystora otrzymuje wystarczające zasilanie, aby zacząć się obracać. W przypadku czarnego koloru na ścieżce napotkanej przez jeden z czujników, światło podczerwone nie jest odbijane, a fotodioda stawia większy opór, powodując zatrzymanie przewodzenia przez tranzystor i ostatecznie zatrzymanie się silnika.
Dzięki temu można sterować całym systemem za pomocą prostego układu LED-fotodioda-tranzystor.
- Z wykorzystaniem mikrokontrolerów
Zasada działania:
Robot odłogujący liniowo jest jednym z robotów samoczynnych. To wykrywa i zakreśla linię narysowaną na tym obszarze. Linia jest oznaczona białą linią na powierzchni bloku lub linią blokową na białej powierzchni. Ten system musi mieć sens przez linię. Ta aplikacja zależy od czujników. Tutaj używamy dwóch czujników do celów wykrywania ścieżki. Czyli czujnik zbliżeniowy i czujnik podczerwieni. Czujnik zbliżeniowy używany do wykrywania ścieżki i czujnik podczerwieni używany do wykrywania przeszkód. Te czujniki są zamontowane w przedniej części robota. Mikrokontroler to inteligentne urządzenie, nad którym cały obwód sterowany jest przez mikrokontroler.

Schemat blokowy linii biegnącej za pojazdem-robotem z mikrokontrolerem
Różne typy zrobotyzowanych pojazdów sterowanych liniowo:
Istnieją dwa typy robotów sterowanych liniowo
- Zautomatyzowany pojazd sterowany linią mobilną
- Zautomatyzowany pojazd sterowany linią radiową
Zastosowania robota śledzącego linię:
- Zastosowania przemysłowe : Te roboty mogą być używane jako zautomatyzowane nośniki sprzętu w branżach zastępujących tradycyjne przenośniki taśmowe.
- Aplikacje samochodowe : Te roboty mogą być również używane jako pliki samochody automatyczne bieganie po drogach z wbudowanymi magnesami.
- Zastosowania domowe : Mogą być również używane w domach do celów domowych, takich jak czyszczenie podłóg itp.
- Aplikacje prowadzące : Można ich używać w miejscach publicznych, takich jak centra handlowe, muzea itp., Aby zapewnić wskazówki dotyczące ścieżki.
Zalety:
- Ruch robota jest automatyczny
- Jest używany do zastosowań na duże odległości
- Prostota budowy
- System zamontuj i zapomnij
- Używany w domu, automatyce przemysłowej itp.