W tym poście badamy specyfikacje techniczne i szczegóły wyprowadzeń układu scalonego IC L293, który jest wszechstronnym układem scalonym czteroosobowego sterownika pół-H i może być używany do implementacji wielu interesujących silników obwód oparty na sterowniku aplikacje, takie jak sterowanie silnikami, solenoidami i innymi obciążeniami indukcyjnymi (4 jednostki oddzielnie lub parami w trybie przeciwsobnym).
Jak to działa
Układ IC L293 zawiera w zasadzie dwie pary wyjść, które mogą być używane niezależnie do obsługi dwóch oddzielnych obciążeń w trybie push pull lub w trybie dwukierunkowym, określanym również jako tryb totem-biegun. Alternatywnie te pary wyjść mogą być indywidualnie służy do obsługi 4 pojedynczych obciążeń w sposób jednokierunkowy.
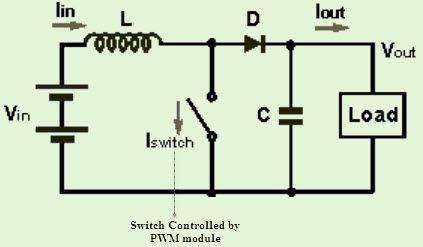
Powyższe operacje obciążeń są kontrolowane przez odpowiednie wyprowadzenia wejściowe, wyzwalane z zewnętrznego obwodu oscylatora lub Źródło PWM .
Na przykład, jeśli wymagane jest, aby obciążenie działało w sposób totemiczny, odpowiednie wejścia dwóch stopni sterownika układu scalonego mogą być wyzwalane z zewnętrznego oscylator, na przykład przez kilka bramek NAND , w którym jedna bramka może być okablowana jako oscylator, a druga jako falownik.
Dwa sygnały przeciwfazowe z nich Bramy NAND następnie może być połączony z wejściami L293 w celu obsługi odpowiednich wyjść w sposób totemiczny (przeciwsobny), który z kolei zasilałby podłączone obciążenie w ten sam sposób.
Przypisanie pinów układu scalonego L293
Teraz nauczmy się funkcji pinów układu IC L293, odwołując się do poniższego schematu i z następującego wyjaśnienia:

Pin # 2 to wejście sterujące, które steruje pinem wyjściowym # 3.
Podobnie, pin # 7 jest wejściem sterującym dla styku wyjściowego # 6.
Pin # 1 służy do włączania lub wyłączania powyższych zestawów pinów. Dodatni na pinie nr 1 utrzymuje powyższe zestawy wyprowadzeń włączone i aktywne, podczas gdy napięcie ujemne lub 0 V natychmiast je wyłącza.
Całkiem identycznie, pin # 15 i pin # 10 stają się wejściami sterującymi dla odpowiednich wyjść pin # 14 i pin # 11 i pozostają one aktywne tylko tak długo, jak pin # 9 jest utrzymywany w logice dodatniej i jest wyłączony, gdy logika 0V jest zastosowane na tym pinoucie.
Jak wyjaśniono wcześniej, pin # 3 i pin # 6 mogą być używane jako pary biegunów totemu przez podanie sygnału logiki przeciwfazowej na ich styk wejściowy # 7 i pin # 2. Oznacza to, że gdy pin # 2 jest zasilany logiką dodatnią, pin # 7 musi mieć logikę ujemną i odwrotnie.
Umożliwi to wyjściom pin # 6 i pin # 3 obsługę podłączonego obciążenia w odpowiednim kierunku i odwrotnie, gdy wejściowe sygnały logiczne zostaną odwrócone, polaryzacja obciążenia jest również odwrócona i zacznie się obracać w przeciwnym kierunku.
Jeśli ta sekwencja jest szybko przełączana, wówczas obciążenie działa odpowiednio w ruchu tam iz powrotem lub w trybie przeciwsobnym.
Powyższą operację można powtórzyć również w drugiej parze przetworników.
Vcc lub dodatnie wejścia zasilania dla układu scalonego są konfigurowane niezależnie dla dwóch różnych wejść zasilania.
Pin # 16, (Vcc1) służy do obsługi pinoutów włączających i do obsługi innych wewnętrznych stopni logicznych układu scalonego i może być zasilany napięciem wejściowym 5 V, chociaż maksymalne ograniczenie to 36 V.
Pin nr 8 (Vcc2) jest specjalnie używany do zasilania silników i może być zasilany dowolnym napięciem od 4,5 V do 36 V
Specyfikacja elektryczna układu scalonego L293
IC L293 jest przeznaczony do pracy z dowolnym zasilaniem od 4,5 V do 36 V, przy maksymalnej specyfikacji obsługi prądu nie większej niż 1 A (2 A w trybie impulsowym, maks. 5 ms)
Dlatego każde obciążenie w ramach wyżej wymienionych specyfikacji może być obsługiwane przez omówione wyjścia układu scalonego L293.
Logika sterowania wejściowego nie powinna być przekraczana powyżej 7 V, czy to przy zasilaniu ciągłym, czy przy zasilaniu PWM.
Używanie L293 IC do aplikacji sterowania silnikiem
Teraz nauczmy się, jak zaimplementować obwody sterownika silnika za pomocą układu IC L293 w różnych trybach pracy i przy użyciu aż 4 silników z oddzielnymi urządzeniami sterującymi.
W naszym poprzednim poście przestudiowaliśmy wyprowadzenia i szczegóły działania układu IC L293, tutaj dowiadujemy się, jak ten sam układ scalony może być używany do sterowania silnikami w określonych trybach i konfiguracjach.
Tryby sterowania
IC L293 może być używany do sterowania silnikami w następujących trybach:
1) 4 silniki poprzez niezależne wejścia PWM.
2) 2 Silniki w trybie dwukierunkowym lub w trybie bieguna totemu z kontrolą prędkości przez PWM
3) Jeden 2-fazowy silnik BLDC z wejściem PWM
Poniższy rysunek pokazuje, w jaki sposób można wykorzystać układ scalony do sterowania silnikami z niezależnymi sterownikami, a także w jaki sposób pojedynczy silnik może być użyty do osiągnięcia sterowanie dwukierunkowe :

Lewa strona układu scalonego przedstawia silnik skonfigurowany do pracy w trybie dwukierunkowym. Aby upewnić się, że silnik obraca się w jednym z wybranych kierunków, styki 1 i 7 muszą być podłączone do wejścia przeciwfazowego 5 V DC. Aby zmienić kierunek obrotów silnika, polaryzację 5 V można zmienić na wspomnianych pinach wejściowych.
Pin # 1 musi być utrzymywany na wysokim poziomie logicznym, aby silnik i układ scalony działały włączone, tutaj logika 0 natychmiast zatrzyma silnik.
Zasilanie na pinoutach wejść sterujących mogłoby mieć postać PWM, do którego można by dodatkowo wykorzystać sterowanie prędkością silnika od 0 do maksimum, po prostu zmieniając cykl pracy PWM.
Prawa strona układu scalonego przedstawia układ, w którym kilka silników jest sterowanych niezależnie przez niezależne wejścia PWM na odpowiednich pinach # 15 i # 10.
Pin # 9 musi być utrzymywany na wysokim poziomie logicznym, aby silnik i układ scalony działały. Logiczne zero na tym wyprowadzeniu natychmiast zatrzyma i wyłączy działanie dołączonych silników.
Ponieważ sekcje po lewej i prawej stronie układu scalonego są identyczne ze szczegółami funkcjonowania ich wyprowadzeń, pokazane rozmieszczenie silników można zamienić na odpowiednie wyprowadzenia, aby uzyskać identyczne działanie, jak wyjaśniono powyżej, co oznacza, że dwa oddzielne silniki mogą być podłączone na lewa strona układu scalonego dokładnie tak, jak zaimplementowano po prawej stronie układu scalonego na schemacie.
Podobnie, system dwukierunkowy mógłby być wbudowany po prawej stronie wyprowadzeń układu scalonego dokładnie tak, jak osiągnięto po lewej stronie układu scalonego na powyższym schemacie.
Powyższy przykład pokazuje, jak układ IC L293 może być używany do sterowania 4 silnikami indywidualnie lub 2 silnikami w trybie dwukierunkowym oraz w jaki sposób można również sterować prędkością za pomocą zasilania PWM na odpowiednich stykach wejściowych układu scalonego.
Wykorzystanie L293 do sterowania 2-fazowym silnikiem BLDC

Na powyższym obrazku możemy zobaczyć, jak układ IC L293 można skonfigurować do sterowania 2-fazowym silnikiem BLDC za pomocą wskazanych styków i za pomocą kilku wejść sterujących pokazanych jako sterowanie A i sterowanie B.
Pojedynczy silnik 2-fazowy można zobaczyć podłączony do wyjść układu scalonego, podczas gdy wejścia są połączone z zestawem bramek NOT, które stają się odpowiedzialne za tworzenie wymaganej logiki wejściowej przeciwfazowej do sterowania silnikiem.
Punkty sterowania A i B mogą podlegać logice przemiennej, aby umożliwić poprawne obracanie się silnika 2-fazowego.
Biegunowość logiki przemiennej decyduje o kierunku obrotów silnika.
W celu uzyskania liniowej regulacji prędkości silnika, logika PWM mogłaby zostać zaimplementowana na wejściach sterujących A i sterujących B, a jej cykl pracy można zmieniać w celu uzyskania żądanej kontroli prędkości na podłączonym silniku.
Jeśli masz dalsze wątpliwości dotyczące specyfikacji technicznych, arkusza danych lub szczegółów wyprowadzeń układu scalonego, zawsze możesz skomentować poniżej, aby uzyskać natychmiastowe odpowiedzi.
Poprzedni: Bezprzewodowy termometr wykorzystujący łącze RF 433 MHz za pomocą Arduino Dalej: Uniwersalny obwód ESC dla silników BLDC i alternatora


![Obwód wskaźnika ciśnienia atmosferycznego [obwód barometru LED]](https://electronics.jf-parede.pt/img/3-phase-power/40/atmospheric-pressure-indicator-circuit-led-barometer-circuit-1.jpg)