W tym poście nauczymy się obwodu zegara wstecznego do przodu do obsługi mechanizmu silnika inkubatora z preferowanym zestawem ruchów. Pomysł został zgłoszony przez pana Anwara
Specyfikacja techniczna
Jestem z Indonezji ..... Potrzebuję schematów dla timera inkubatora z silnikiem o wysokim momencie obrotowym (okno zasilania silnika prądu stałego w samochodzie). Próbuję zmusić silnik prądu stałego do pracy w dwóch kierunkach, aż osiągnie położenie końcowe, a następnie zatrzymaj się i przełącz polaryzację, aby po ponownym włączeniu zasilania działał w drugim kierunku. Następnie zrób to samo na drugim końcu.
1. timer włącza zasilanie na 1 min. (7: 00–7: 01)
2. silnik obraca się w jednym kierunku, aż osiągnie pozycję zatrzymania, powiedzmy 30 sekund.
3. Zasilanie silnika wyłącza się po osiągnięciu pozycji zatrzymania i opóźnia się o 1 min. zegar do zakończenia / wyłączenia głównego zasilania. również odwraca polaryzację, więc.
4. następnym razem, gdy włączy się główny zegar (10: 00-10: 01), dozuje to samo w odwrotnym kierunku i ciągle się powtarza
5. Silnik 12 VDC do tyłu (tylko dwa kable od silnika + i -)
6. Potrzebujesz wskaźnika LED dla silnika Rev / Fwd
Czy możesz mi pomóc, sir?
Z góry dziękuję za pomoc.
To ważny projekt domowy, który musi być w 100% niezawodny.
Projektowanie

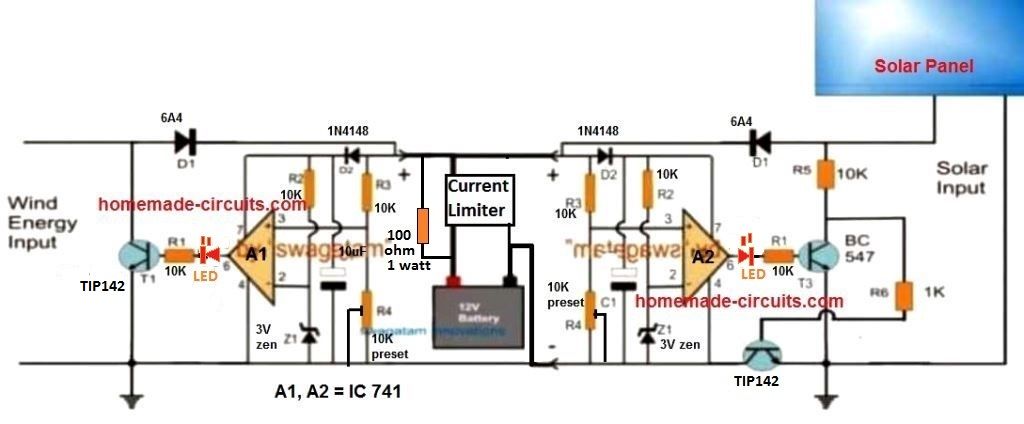
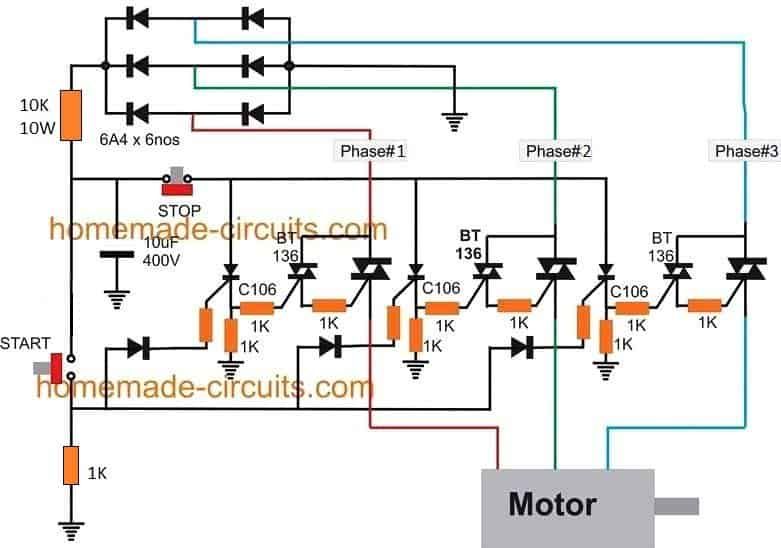
Na powyższym rysunku możemy zwizualizować projekt implementacji proponowanego ruchu wstecznego silnika inkubatora po określonym z góry przedziale czasu.
W momencie włączenia zasilania mamy następujący scenariusz:
Można założyć, że przełącznik magnetyczny „set” znajduje się w stanie dezaktywacji lub jest wciśnięty, gdy silnik lub zaprojektowany mechanizm inkubatora znajdują się w zerowej pozycji startowej.
Należy pamiętać, że najlepiej przełączniki „set” / „reset” powinny być realizowane za pomocą kontaktronów magnetycznych.
Gdy zasilanie jest włączone, układ IC 4060 jest resetowany przez C2, tak że inicjuje proces zliczania od zera, a pin3 jest traktowany jako logika zerowa.
Ta początkowa logika zerowa jest podawana przez C3 do podstawy T1, która natychmiast wymusza aktywację T3 i skojarzonego z nim przekaźnika. R7 w procesie zapewnia zablokowanie T1 / T3 w tym trybie.
Przekaźnik DPDT w tym momencie pobudza swoje styki N / O inicjując silnik i mechanizm w kierunku zakładanego ruchu „do przodu”.
Gdy tylko silnik zacznie się poruszać, przycisk `` ustaw '' jest zwalniany tak, że T4 i górny SPDT mają możliwość zadziałania, przy czym przekaźnik SPDT osiąga przełączenie pozycji N / O, co powoduje, że styki N / C DPDT są w stanie gotowości Dostawa..
Silnik i / lub mechanizm porusza się, aż osiągnie pozycję „reset”, która powoduje aktywację T2 i zerwanie zatrzasku T1 / T4.
Gdy T4 jest wyłączony, przekaźnik DPDT zmienia swoją pozycję z N / O na N / C i zapewnia ruch przeciwny (do tyłu) do mechanizmu silnika.
Mechanizm silnika inkubatora zmienia teraz swój kierunek i inicjuje ruch wsteczny, aż osiągnie punkt `` zadany '', który szybko wyłącza napęd podstawowy T4, SPDT wyłącza moc cięcia DPDT i cały mechanizm zatrzymuje się .
W międzyczasie układ scalony IC 4060 kontynuuje zliczanie, aż ponownie wytworzy logikę zerową po przejściu przez wysoki stan logiczny na swoim pinie3 (przez rozładowanie C3).
Cykl zostaje ponownie zainicjowany i powtarza procedurę, jak wyjaśniono powyżej.
Poprzedni: Mruganie diodą LED z Arduino - kompletny samouczek Dalej: Zbadano przemysłowy tłumik przepięć dużej mocy