Jednak proces zawsze zachowuje zależność P = I x V, co oznacza, że gdy na wyjściu przekształtnika podnosi się napięcie wejściowe, na wyjściu proporcjonalnie następuje redukcja prądu, co powoduje, że moc wyjściowa jest prawie zawsze równa mocy wejściowej moc lub mniej niż moc wejściowa.
Jak działa Boost Converter
Przetwornica podwyższająca napięcie to rodzaj zasilacza impulsowego lub zasilacza impulsowego, który zasadniczo działa z dwoma aktywnymi półprzewodnikami (tranzystor i dioda) oraz z co najmniej jednym elementem pasywnym w postaci kondensatora lub cewki indukcyjnej lub obu dla większej wydajności.Cewka indukcyjna jest tutaj zasadniczo używana do podwyższania napięcia, a kondensator jest wprowadzany do filtrowania fluktuacji przełączania i do zmniejszania tętnień prądu na wyjściu przekształtnika.
Zasilanie wejściowe, które może wymagać zwiększenia lub zwiększenia, można uzyskać z dowolnego odpowiedniego źródła prądu stałego, takiego jak baterie, panele słoneczne, generatory silnikowe itp.
Zasada działania
Cewka indukcyjna w przetwornicy podwyższającej odgrywa ważną rolę w zwiększaniu napięcia wejściowego.
Kluczowym aspektem, który staje się odpowiedzialny za aktywację napięcia doładowania z cewki indukcyjnej, jest jego nieodłączna właściwość oporu lub przeciwstawiania się nagle indukowanemu prądowi przez nią, a także z powodu jego odpowiedzi na to poprzez wytworzenie pola magnetycznego, a następnie zniszczenie pola magnetycznego. pole. Niszczenie prowadzi do uwolnienia zmagazynowanej energii.
Ten powyższy proces skutkuje gromadzeniem prądu w cewce indukcyjnej i odrzucaniem tego zmagazynowanego prądu na wyjściu w postaci zwrotnej EMF.
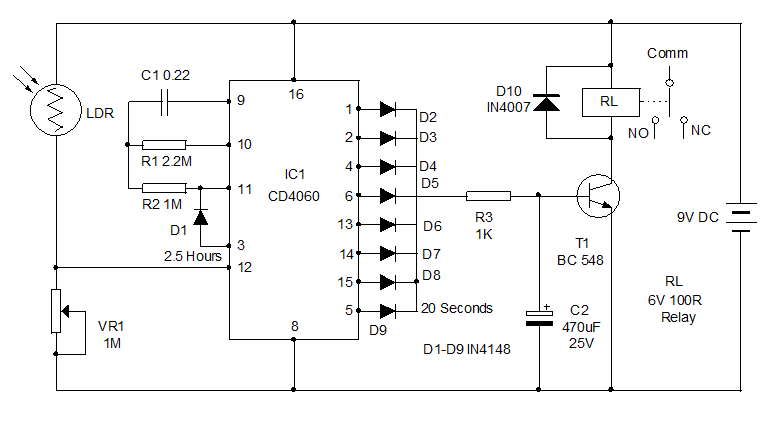
Obwód sterownika tranzystora przekaźnikowego można uznać za doskonały przykład obwodu przetwornika podwyższającego napięcie. Dioda flyback podłączona do przekaźnika jest wprowadzana w celu zwarcia odwrotnych pól elektromagnetycznych z cewki przekaźnika i ochrony tranzystora przy wyłączaniu.
Jeśli ta dioda zostanie usunięta, a prostownik kondensatora diodowego zostanie podłączony do kolektora / emitera tranzystora, wzmocnione napięcie z cewki przekaźnika może zostać zebrane na tym kondensatorze.

Proces w konstrukcji przetwornicy podwyższającej napięcie powoduje, że napięcie wyjściowe jest zawsze wyższe niż napięcie wejściowe.
Konfiguracja Boost Converter
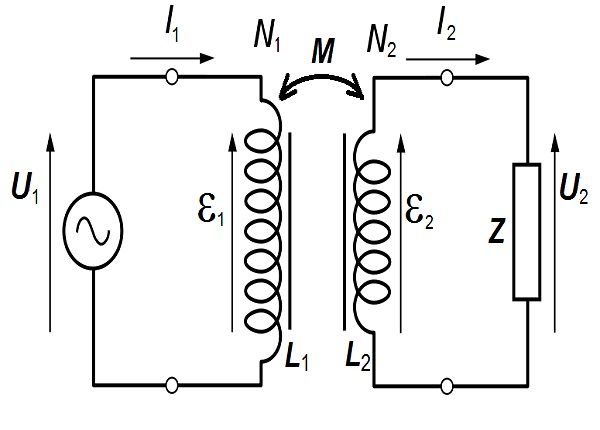
Odnosząc się do poniższego rysunku, widzimy standardową konfigurację przekształtnika boost, wzorzec pracy można rozumieć w następujący sposób:Kiedy pokazane urządzenie (które może być dowolnym standardowym BJT lub mosfetem mocy) jest włączone, prąd z zasilania wejściowego wchodzi do cewki i przepływa zgodnie z ruchem wskazówek zegara przez tranzystor, aby zakończyć cykl na ujemnym końcu zasilania wejściowego.

Podczas powyższego procesu induktor doświadcza nagłego przepływu prądu przez siebie i próbuje oprzeć się napływowi, co powoduje gromadzenie się w nim pewnej ilości prądu poprzez wytwarzanie pola magnetycznego.
W następnej kolejnej sekwencji, gdy tranzystor jest wyłączany, przewodzenie prądu zrywa się, ponownie wymuszając gwałtowną zmianę poziomu prądu na cewce. Cewka reaguje na to, odrzucając lub uwalniając zmagazynowany prąd. Ponieważ tranzystor jest w pozycji OFF, energia ta znajduje drogę przez diodę D i przez pokazane zaciski wyjściowe w postaci napięcia wstecznego EMF.

Cewka indukcyjna dokonuje tego niszcząc pole magnetyczne, które powstało w niej wcześniej, gdy tranzystor był w trybie włączania.
Jednak powyższy proces uwalniania energii jest realizowany z przeciwną polaryzacją, tak że wejściowe napięcie zasilania staje się teraz szeregowo z napięciem zwrotnym emf cewki indukcyjnej. A jak wszyscy wiemy, kiedy źródła zasilania łączą się szeregowo, ich napięcie netto sumuje się, tworząc większy łączny wynik.
To samo dzieje się w przetwornicy podwyższającej napięcie podczas trybu rozładowania cewki indukcyjnej, wytwarzając wyjście, które może być połączonym wynikiem napięcia wstecznego pola elektromagnetycznego cewki indukcyjnej i istniejącego napięcia zasilania, jak pokazano na powyższym schemacie.
To połączone napięcie skutkuje wzmocnionym wyjściem lub podwyższonym wyjściem, które znajduje swoją ścieżkę przez diodę D i kondensator poprzeczny C, aby ostatecznie dotrzeć do podłączonego obciążenia.
Kondensator C odgrywa tutaj dość ważną rolę, w trybie rozładowania cewki kondensator C przechowuje w nim uwolnioną połączoną energię, a podczas następnej fazy, gdy tranzystor ponownie się wyłącza, a cewka jest w trybie magazynowania, kondensator C próbuje utrzymanie równowagi poprzez dostarczanie własnej zmagazynowanej energii do obciążenia. Zobacz rysunek poniżej.

Zapewnia to względnie stabilne napięcie dla podłączonego obciążenia, które jest w stanie uzyskać moc zarówno w okresach włączenia, jak i wyłączenia tranzystora.
Jeśli C nie jest uwzględnione, funkcja ta jest anulowana, co skutkuje mniejszą mocą obciążenia i niższym współczynnikiem sprawności.
Wyżej wyjaśniony proces trwa, gdy tranzystor jest włączany / wyłączany przy danej częstotliwości, podtrzymując efekt konwersji doładowania.
Tryby działania
Przetwornica podwyższająca napięcie może pracować głównie w dwóch trybach: trybie ciągłym i trybie nieciągłym.W trybie ciągłym prąd cewki indukcyjnej nigdy nie może osiągnąć zera podczas procesu jego rozładowywania (gdy tranzystor jest wyłączony).
Dzieje się tak, gdy czas włączenia / wyłączenia tranzystora jest zwymiarowany w taki sposób, że cewka indukcyjna jest zawsze szybko podłączana z powrotem do zasilania wejściowego przez włączony tranzystor, zanim będzie w stanie całkowicie rozładować się przez obciążenie i kondensator C.
Pozwala to cewce na ciągłe wytwarzanie napięcia doładowania z wydajną szybkością.
W trybie nieciągłym czas włączenia przełącznika tranzystora może być tak szeroki, że cewka może zostać całkowicie rozładowana i pozostać nieaktywna między okresami włączania tranzystora, powodując ogromne tętnienia napięcia na obciążeniu i kondensatorze C.
Może to sprawić, że produkcja będzie mniej wydajna i będzie powodować większe wahania.
Najlepszym podejściem jest obliczenie czasu włączenia / wyłączenia tranzystora, który daje maksymalne stabilne napięcie na wyjściu, co oznacza, że musimy upewnić się, że cewka jest optymalnie przełączana tak, aby nie była włączana zbyt szybko, co może uniemożliwić jej rozładowanie optymalnie i nie włączać go zbyt późno, co mogłoby spowodować utratę wydajności.
Obliczanie, indukcyjność, prąd, napięcie i cykl pracy w konwerterze wspomagającym
Tutaj omówimy tylko tryb ciągły, który jest preferowanym sposobem obsługi przetwornicy podwyższającej, oceńmy obliczenia związane z przetwornicą podwyższającą w trybie ciągłym:Gdy tranzystor jest w fazie włączenia, napięcie źródła wejściowego (
 ) jest nakładany na cewkę indukcyjną, indukując prąd (
) jest nakładany na cewkę indukcyjną, indukując prąd (  ) gromadzą się przez cewkę indukcyjną przez okres czasu oznaczony (t). Można to wyrazić następującym wzorem:
) gromadzą się przez cewkę indukcyjną przez okres czasu oznaczony (t). Można to wyrazić następującym wzorem: ΔIL / Δt = Vt / L
Zanim stan włączenia tranzystora ma się skończyć, a tranzystor ma się wyłączyć, prąd, który ma gromadzić się w cewce indukcyjnej, można podać za pomocą następującego wzoru:
ΔIL (wł.) = 1 / L 0ʃDT
lub
Szerokość = DT (Vi) / L
Gdzie D to cykl pracy. Aby zrozumieć jego definicję, możesz odwołać się do naszego poprzedniego b post związany z konwerterem uck
L oznacza wartość indukcyjności cewki w Henry.
Teraz, gdy tranzystor jest w stanie WYŁĄCZONY i jeśli założymy, że dioda oferuje minimalny spadek napięcia na nim, a kondensator C jest wystarczająco duży, aby był w stanie wytworzyć prawie stałe napięcie wyjściowe, wówczas prąd wyjściowy (
) można wywnioskować za pomocą następującego wyrażenia Vi - Vo = LdI / dt
Ponadto obecne zmiany (
), które może wystąpić na cewce indukcyjnej w okresie jej rozładowania (stan wyłączenia tranzystora) można podać jako: ΔIL (wył.) = 1 / L x DTʃT (Vi - Vo) dt / L = (Vi - Vo) (1 - D) T / L
Zakładając, że przetwornica może pracować w stosunkowo stabilnych warunkach, można przyjąć, że wielkość prądu lub energia zmagazynowana wewnątrz cewki indukcyjnej przez cały cykl komutacji (przełączania) jest stała lub z taką samą szybkością, można to wyrazić jako:
E = ½ L x 2IL
Z powyższego wynika również, że skoro prąd w całym okresie komutacji lub na początku stanu ON i na końcu stanu OFF powinien być identyczny, to ich wypadkowa wartość zmiany poziomu prądu powinna wynosić zero, ponieważ wyrażone poniżej:
ΔIL (wł.) + ΔIL (wył.) = 0
Jeśli podstawimy wartości ΔIL (on) i ΔIL (off) w powyższym wzorze z poprzednich wyprowadzeń, otrzymamy:
IL (wł.) - ΔIL (wył.) = Vidt / L + (Vi - Vo) (1 - D) T / L = 0
Dalsze uproszczenie tego daje następujący wynik: Vo / Vi = 1 / (1 - D)
lub
Vo = Vi / (1 - D)
Powyższe wyrażenie jasno określa, że napięcie wyjściowe w przetwornicy podwyższającej będzie zawsze wyższe niż napięcie wejściowe zasilania (w całym zakresie cyklu pracy, od 0 do 1)
Tasując wyrazy po bokach powyższego równania, otrzymujemy równanie do wyznaczania cyklu pracy w cyklu pracy przetwornicy podwyższającej ciśnienie.
D = 1 - Vo / Vi
Powyższe oceny dają nam różne formuły do określania różnych parametrów zaangażowanych w działanie przetwornicy podwyższającej ciśnienie, które można skutecznie wykorzystać do obliczenia i optymalizacji dokładnego projektu przetwornicy doładowania.
Oblicz stopień mocy konwertera doładowania
Poniższe 4 wytyczne są niezbędne do obliczenia stopnia mocy przetwornicy wspomagającej:
1. Zakres napięcia wejściowego: Vin (min) i Vin (max)
2. Minimalne napięcie wyjściowe: Vout
3. Najwyższy prąd wyjściowy: Iout (max)
4. Obwód IC wykorzystany do budowy przetwornicy podwyższającej.
Często jest to obowiązkowe, po prostu dlatego, że należy przyjąć pewne schematy obliczeń, o których nie można wspomnieć w arkuszu danych.
W przypadku, gdy ograniczenia te są znane, zwykle przybliżenie stopnia mocy
ma miejsce.
Ocena najwyższego prądu przełączania
Podstawowym krokiem do określenia prądu przełączania byłoby ustalenie cyklu pracy D dla minimalnego napięcia wejściowego. Jedyne minimalne napięcie wejściowe jest stosowane głównie dlatego, że skutkuje to najwyższym prądem przełączania.
D = 1 - {Vin (min) x n} / Vout ---------- (1)
Vin (min) = minimalne napięcie wejściowe
Vout = wymagane napięcie wyjściowe
n = sprawność konwertera, np. przewidywana wartość może wynosić 80%
Sprawność jest uwzględniana w kalkulacji cyklu pracy, po prostu dlatego, że konwerter musi również przedstawiać straty mocy. To oszacowanie zapewnia bardziej rozsądny cykl pracy w porównaniu ze wzorem bez współczynnika wydajności.
Musimy ewentualnie pozwolić na szacowaną 80% tolerancję (co nie może być niepraktyczne w przypadku wzmocnienia
Najgorsza sprawność konwertera), należy rozważyć lub ewentualnie odnieść się do części dotyczącej funkcji konwencjonalnych w arkuszu danych wybranego konwertera
Obliczanie prądu tętnienia
Następnym działaniem w celu obliczenia największego prądu przełączania byłoby określenie prądu tętnienia cewki indukcyjnej.
W arkuszu danych konwertera zwykle określa się konkretny cewkę lub różne cewki indukcyjne, które współpracują z układem scalonym. Dlatego musimy albo użyć sugerowanej wartości cewki indukcyjnej, aby obliczyć prąd tętnienia, jeśli nic nie jest przedstawione w arkuszu danych, szacowanym na liście cewek.
S wybór tej noty aplikacyjnej do obliczania stopnia mocy konwertera doładowania.
Delta I (l) = {Vin (min) x D} / f (s) x L ---------- (2)
Vin (min) = najmniejsze napięcie wejściowe
D = cykl roboczy mierzony w równaniu 1
f (s) = najmniejsza częstotliwość przełączania przekształtnika
L = preferowana wartość cewki
Następnie należy ustalić, czy preferowany układ scalony może być w stanie zapewnić optymalną wydajność
obecny.
Iout (max) = [I lim (min) - Delta I (l) / 2] x (1 - D) ---------- (3)
I lim (min) = minimalna wartość
bieżące ograniczenie danego przełącznika (zaznaczone w danych
arkusz)
Delta I (l) = prąd tętnienia cewki indukcyjnej zmierzony we wcześniejszym równaniu
D = cykl pracy obliczony w pierwszym równaniu
W przypadku, gdy szacunkowa wartość optymalnego prądu wyjściowego wybranego układu scalonego, Iout (max), jest niższa od oczekiwanego przez układy największego prądu wyjściowego, naprawdę należy zastosować alternatywny układ scalony z nieco wyższym sterowaniem prądem przełącznika.
Pod warunkiem, że zmierzona wartość Iout (max) jest prawdopodobnie o jeden odcień mniejszy niż oczekiwany, można ewentualnie zastosować zrekrutowany układ scalony z cewką indukcyjną o większej indukcyjności, ilekroć znajduje się on nadal w przepisanej serii. Większa indukcyjność zmniejsza tętnienie prądu, dlatego zwiększa maksymalny prąd wyjściowy z określonym układem scalonym.
Jeśli ustalona wartość jest wyższa od najlepszego prądu wyjściowego programu, obliczany jest największy prąd przełączania w urządzeniu:
Isw (max) = Delta I (L) / 2 + Iout (max) / (1 - D) --------- (4)
Delta I (L) = prąd tętnienia cewki indukcyjnej mierzony w drugim równaniu
Iout (max), = optymalny prąd wyjściowy niezbędny w narzędziu
D = cykl pracy zmierzony wcześniej
W rzeczywistości jest to optymalny prąd, cewka indukcyjna, dołączony przełącznik (i) oprócz zewnętrznej diody musi się przeciwstawić.
Wybór cewki indukcyjnej
Czasami arkusze danych podają liczne zalecane wartości induktora. W takiej sytuacji wolisz cewkę indukcyjną z tym zakresem. Im większa wartość cewki, tym większy jest maksymalny prąd wyjściowy, głównie z powodu zmniejszonego prądu tętnienia.
Zmniejszona wartość induktora, pomniejszona to rozmiar roztworu. Należy pamiętać, że cewka naprawdę powinna zawsze mieć lepszą wartość znamionową prądu w porównaniu do maksymalnego prądu określonego w równaniu 4, ponieważ prąd przyspiesza wraz ze spadkiem indukcyjności.
W przypadku elementów, w których nie podano zakresu cewek, poniższy rysunek przedstawia wiarygodne obliczenia dla odpowiedniego induktora
L = Vin x (Vout - Vin) / Delta I (L) x f (s) x Vout --------- (5)
Vin = standardowe napięcie wejściowe
Vout = preferowane napięcie wyjściowe
f (s) = minimalna częstotliwość przełączania przekształtnika
Delta I (L) = przewidywany prąd tętnienia cewki indukcyjnej, patrz poniżej:
Prąd tętnienia cewki indukcyjnej po prostu nie może być zmierzony za pomocą pierwszego równania, tylko dlatego, że induktor nie został rozpoznany. Dźwiękowe przybliżenie prądu tętnienia cewki indukcyjnej wynosi 20% do 40% prądu wyjściowego.
Delta I (L) = (0,2 do 0,4) x Iout (max) x Vout / Vin ---------- (6)
Delta I (L) = przewidywany prąd tętnienia cewki indukcyjnej
Iout (max) = optymalna moc
prąd wymagany dla aplikacji
Wyznaczanie diody prostownika
Aby zmniejszyć straty, diody Schottky'ego naprawdę należy uznać za dobry wybór.
Uważany za niezbędny prąd przewodzenia jest równy maksymalnemu prądowi wyjściowemu:
I (f) = Iout (max) ---------- (7)
I (f) = typowe
prąd przewodzenia diody prostowniczej
Iout (max) = optymalny prąd wyjściowy ważny w programie
Diody Schottky'ego charakteryzują się znacznie większą wartością szczytową prądu w porównaniu z normalną wartością znamionową. Dlatego zwiększony prąd szczytowy w programie nie jest dużym problemem.
Drugim parametrem, który ma być monitorowany, jest rozpraszanie mocy diody. Składa się z do obsługi:
P (d) = I (f) x V (f) ---------- (8)
I (f) = średni prąd przewodzenia diody prostowniczej
V (f) = napięcie przewodzenia diody prostowniczej
Ustawienie napięcia wyjściowego
Większość konwerterów przydziela napięcie wyjściowe za pomocą rezystancyjnej sieci dzielnika (która może być wbudowanapowinny być stacjonarnymi przetwornicami napięcia wyjściowego).
Przy przypisanym napięciu sprzężenia zwrotnego, V (fb) i prądzie polaryzacji sprzężenia zwrotnego I (fb), dzielnik napięcia
obliczone.

Prąd za pomocą dzielnika rezystancyjnego może być około sto razy większy niż prąd polaryzacji sprzężenia zwrotnego:
I (r1 / 2)> lub = 100 x I (fb) ---------- (9)
I (r1 / 2) = prąd w trakcie dzielnika rezystancyjnego do GND
I (fb) = odchylenie sprzężenia zwrotnego prąd z arkusza danych
Zwiększa to poniżej 1% niedokładności oceny napięcia. Prąd jest dodatkowo znacznie większy.
Głównym problemem związanym z mniejszymi wartościami rezystorów jest zwiększona strata mocy w dzielniku rezystancyjnym, z wyjątkiem tego, że trafność może być nieco podwyższona.
Z powyższym przekonaniem, rezystory są opracowywane w następujący sposób:
R2 = V (fb) / I (r1 / 2) ---------- (10)
R1 = R2 x [Vout / V (fb) - 1] ---------- (11)
R1, R2 = dzielnik rezystancyjny.
V (fb) = napięcie sprzężenia zwrotnego z arkusza danych
I (r1 / 2) = prąd wynikający z dzielnika rezystancyjnego do GND, ustalony w równaniu 9
Vout = planowane napięcie wyjściowe
Wybór kondensatora wejściowego
Najmniejsza wartość kondensatora wejściowego jest zwykle podawana w arkuszu danych. Ta najmniejsza wartość jest niezbędna dla ustabilizowania napięcia wejściowego ze względu na warunek wstępny prądu szczytowego dla zasilacza impulsowego.
Najbardziej odpowiednią metodą jest użycie kondensatorów ceramicznych o zredukowanej równoważnej rezystancji szeregowej (ESR).
Element dielektryczny musi być X5R lub wyższy. W przeciwnym razie kondensator mógłby stracić większość swojej pojemności z powodu odchylenia DC lub temperatury (patrz odniesienia 7 i 8).
W rzeczywistości wartość można zwiększyć, jeśli być może napięcie wejściowe jest zaszumione.
Wybór kondensatorów wyjściowych
Najlepszą metodą jest zlokalizowanie małych kondensatorów ESR w celu zmniejszenia tętnień napięcia wyjściowego. Kondensatory ceramiczne są odpowiednim typem, gdy element dielektryczny jest typu X5R lub bardziej wydajnyW przypadku, gdy przetwornik ma zewnętrzną kompensację, można zastosować dowolny rodzaj wartości kondensatora powyżej zalecanej najmniejszej w arkuszu danych, ale w jakiś sposób kompensacja musi zostać zmieniona dla wybranej pojemności wyjściowej.
W przypadku konwerterów z wewnętrzną kompensacją należy przyzwyczaić się do zalecanych wartości cewki indukcyjnej i kondensatora lub przyjąć informacje w arkuszu danych o adaptacji kondensatorów wyjściowych ze stosunkiem L x C.
W przypadku kompensacji wtórnej poniższe równania mogą być pomocne w regulacji wartości kondensatora wyjściowego dla planowanego tętnienia napięcia wyjściowego:
Cout (min) = Iout (max) x D / f (s) x Delta Vout ---------- (12)
Cout (min) = najmniejsza pojemność wyjściowa
Iout (max) = optymalny prąd wyjściowy użytkowania
D = cykl pracy określony równaniem 1
f (s) = najmniejsza częstotliwość przełączania przekształtnika
Delta Vout = idealne tętnienie napięcia wyjściowego
ESR kondensatora wyjściowego zwiększa tętnienie myślnika, wstępnie przypisane równaniem:
Delta Vout (ESR) = ESR x [Iout (max) / 1 -D + Delta I (l) / 2] ---------- (13)
Delta Vout (ESR) = alternatywne tętnienie napięcia wyjściowego wynikające z ESR kondensatorów
ESR = równoważna rezystancja szeregowa zastosowanego kondensatora wyjściowego
Iout (max) = największy prąd wyjściowy obciążenia
D = cykl pracy określony w pierwszym równaniu
Delta I (l) = prąd tętnienia cewki indukcyjnej z równania 2 lub równania 6
Równania do oceny stopnia mocy konwertera wspomagającego
Maksymalny cykl pracy: D = 1 - Wino (min) x n / Vout ---------- (14)
Vin (min) = najmniejsze napięcie wejściowe
Vout = oczekiwane napięcie wyjściowe
n = sprawność konwertera, np. szacunkowo 85%
Prąd tętnienia cewki indukcyjnej:
Delta I (l) = Vin (min) x D / f (s) x L ---------- (15)
Vin (min) = najmniejsze napięcie wejściowe
D = cykl pracy określony w równaniu 14
f (s) = nominalna częstotliwość przełączania przekształtnika
L = określona wartość induktora
Maksymalny prąd wyjściowy wyznaczonego układu scalonego:
Iout (max) = [Ilim (min) - Delta I (l)] x (1 - D) ---------- (16)Ilim (min) = najmniejsza wartość aktualnego ograniczenia integralnego (podana w karcie katalogowej)
Delta I (l) = prąd tętnienia cewki indukcyjnej ustalony w równaniu 15
D = cykl pracy oszacowany w równaniu 14
Maksymalny prąd przełączania dla aplikacji:
Isw (max) = Delta I (l) / 2 + Iout (max) / (1 - D) ---------- (17)Delta I (l) = prąd tętnienia cewki indukcyjnej oszacowany w równaniu 15
Iout (max), = najwyższy możliwy prąd wyjściowy wymagany w narzędziu
D = cykl pracy określony w równaniu 14
Przybliżenie cewki indukcyjnej:
L = Vin x (Vout - Vin) / Delta I (l) x f (s) x Vout ---------- (18)Vin = wspólne napięcie wejściowe
Vout = planowane napięcie wyjściowe
f (s) = najmniejsza częstotliwość przełączania przekształtnika
Delta I (l) = przewidywany prąd tętnienia cewki indukcyjnej, patrz Równanie 19
Wycena prądu tętnienia cewki indukcyjnej:
Delta I (l) = (0,2 do 0,4) x Iout (max) x Vout / Vin ---------- (19)Delta I (l) = przewidywany prąd tętnienia cewki indukcyjnej
Iout (max) = najwyższy prąd wyjściowy ważny podczas użytkowania
Typowy prąd przewodzenia diody prostowniczej:
I (f) = Iout (max) ---------- (20)
Iout (max) = optymalny prąd wyjściowy odpowiedni dla narzędzia
Rozpraszanie mocy w diodzie prostowniczej:
P (d) = I (f)
x V (f) ---------- (21)
I (f) = typowy prąd przewodzenia diody prostowniczej
V (f) = napięcie przewodzenia diody prostowniczej
Prąd przy użyciu rezystancyjnej sieci dzielników do pozycjonowania napięcia wyjściowego:
I (r1 / 2)> lub = 100 x I (fb) ---------- (22)I (fb) = odchylenie sprzężenia zwrotnego prąd z arkusza danych
Wartość rezystora między pinem FB a GND:
R2 = V (fb) / I (r1 / 2) ---------- (23)
Wartość rezystora między pinem FB a Vout:
R1 = R2 x [Vout / V (fb) - 1] ---------- (24)
V (fb) = napięcie sprzężenia zwrotnego z arkusza danych
I (r1 / 2) = prąd
z powodu dzielnika rezystancyjnego do GND, obliczonego w równaniu 22
Vout = poszukiwane napięcie wyjściowe
Najmniejsza pojemność wyjściowa, w przeciwnym razie wstępnie przypisana w arkuszu danych:
Cout (min) = Iout (max) x D / f (s) x Delta I (l) ---------- (25)
Iout (max) = najwyższy możliwy prąd wyjściowy programu
D = cykl pracy określony w równaniu 14
f (s) = najmniejsza częstotliwość przełączania przekształtnika
Delta Vout = oczekiwane tętnienie napięcia wyjściowego
Nadmierne tętnienie napięcia wyjściowego spowodowane ESR:
Delta Vout (esr) = ESR x [Iout (max) / (1 - D) + Delta I (l) / 2 ---------- (26)
ESR = równoległa rezystancja szeregowa zastosowanego kondensatora wyjściowego
Iout (max) = optymalny prąd wyjściowy użytkowania
D = cykl pracy określony w równaniu 14
Delta I (l) = prąd tętnienia cewki indukcyjnej z równania 15 lub równania 19
Poprzedni: Zrób ten obwód skutera elektrycznego / rikszy Dalej: Obliczanie cewek w przetwornikach Buck Boost