Roboty mają wiele zastosowań w przemyśle, wojsku, gospodarstwie domowym. Jednym z głównych zastosowań robotów jest dobro ludzi. Niezależnie od tego, czy są to jakiekolwiek niebezpieczne sytuacje, takie jak wybuch pożaru czy miejsce pełne min, roboty mogą łatwo znaleźć wyjście z tych problemów. Przyjrzyjmy się więc dwóm typom robotów - robotowi wykrywającemu miny lądowe i robotowi gaśniczemu
Robot wykrywający minę lądową
Jak wyczuć minę lądową za pomocą robotów?
Jednym z najważniejszych zastosowań robotyki jest obrona. Robot wojskowy to zdalnie sterowany pojazd z wieloma unikalnymi cechami. Może to być zautomatyzowany pojazd z kamerą do szpiegowania, zautomatyzowany pojazd z działem LASEROWYM do wykrywania i niszczenia celów lub robot z wykrywacz metali wykrywanie obecności min lądowych.
Jednym z tradycyjnych i konwencjonalnych sposobów wykrywania min jest wykorzystanie wyszkolonych pracowników, którzy ręcznie wyszukują metale lub miny za pomocą wykrywacza metali. Jest to jednak niebezpieczne i drogie, a także powolne.
Aby rozwiązać ten problem, preferowany jest znacznie bardziej zaawansowany system.
Kilka sposobów wykrywania min:
- Korzystanie z robota, który może wbić w ziemię sondę, która może wykryć obiekty znajdujące się pod ziemią i określić rodzaj materiału.
- Używanie robota z wykrywaczem metalu, który może wykryć obecność elementów przewodzących, takich jak miny, i zaalarmować użytkownika.
Zanim przejdziemy dalej do szczegółów dotyczących drugiego typu - czyli robota z wykrywaczem metali, przypomnijmy sobie krótko dwa ważne pojęcia - miny i wykrywacz metali.
DO Mina lądowa jest urządzeniem wybuchowym umieszczonym celowo pod ziemią, które wybucha pod wpływem ciśnienia. Według raportu statystycznego w 70 krajach na całym świecie jest około 100 milionów min przeciwpiechotnych. Raz postawiona mina może działać do 50 lat. Czy to nie jest niebezpieczne !!

Podstawowy wykrywacz metali działa na zasadzie prawa indukcji Faradaya. Składa się z cewki, która jest zasilana energią, aby wytworzyć wokół siebie pulsujące pole magnetyczne. Kiedy cewka znajdzie się w pobliżu elementu przewodzącego, takiego jak metal (kopalnia), indukowany jest w niej prąd elektryczny (prąd wirowy). Indukowany prąd wirowy powoduje powstanie pola elektromagnetycznego wokół metalu, które jest ponownie przesyłane do cewki, która wytwarza analizowany sygnał elektryczny. Większa jest odległość między cewką a metalem, słabsze jest pole magnetyczne.
Prosty prototyp:

Prosty prototyp zrobotyzowanego pojazdu z wykrywaczem metali
Projektowanie robota:
Pojazd robotyczny składa się z następujących jednostek:
- Prostokątna podstawa do podparcia całej konstrukcji robota, mocowana dwoma kołami do ruchu.
- Kilka silników prądu stałego zapewniających wymagany ruch robota.
- Jednostka sterująca składająca się z odbiornika RF, który odbiera sygnały sterujące z jednostki nadajnika, aby sterować sterownikiem silnika i odpowiednio sterować silnikami.
- Obwód wykrywacza metali wraz z alarmem dźwiękowym jest wyzwalany po wykryciu metalu.
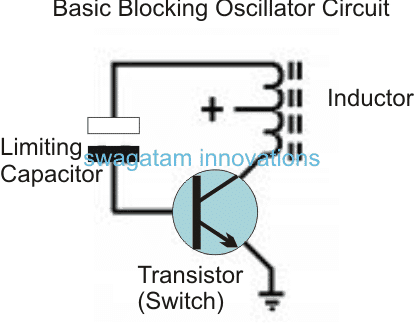
Jak działa robot:
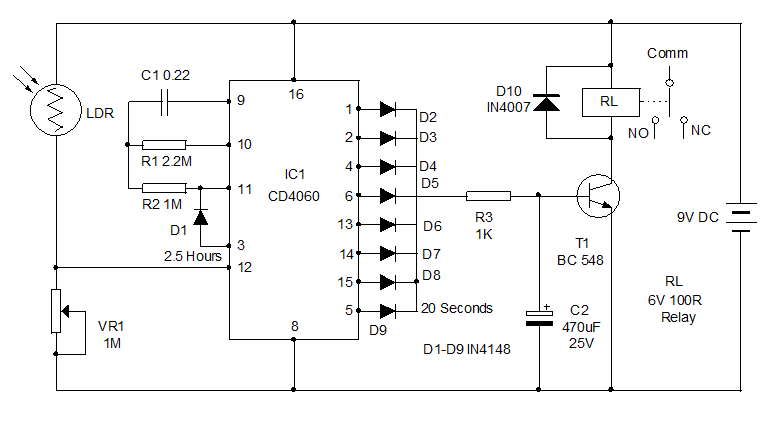
Obwód wykrywacza metalu osadzony w obwodzie sterowania robota składa się z tranzystora, który jest napędzany przez dostrojony obwód oscylatora składający się z cewki. Kiedy metal zostanie wykryty, a prąd elektryczny zostanie ponownie przesłany przez cewkę, tranzystor 1 jest w stanie włączonym i przełącza inny tranzystor 2 do stanu wyłączenia. Ten tranzystor3 z kolei ustawia inny tranzystor w stan wyłączenia. Ten konkretny tranzystor 3 jest połączony z innym tranzystorem 4, który jest podłączony w taki sposób, że jest włączony, gdy jego tranzystor sterujący 3 jest wyłączony. Tranzystor 4 jest podłączony w taki sposób, że w stanie włączenia brzęczyk i dioda LED otrzymują właściwe napięcie polaryzacyjne i zaczynają przewodzić.

Schemat blokowy detektora metali
Dioda LED zaczyna się świecić, a brzęczyk zaczyna dzwonić. Zatem po wykryciu metalu alarm dźwiękowy zacznie dzwonić, a dioda LED zacznie świecić.
Sterowanie robotem:
Prostym prototypem można sterować za pomocą komunikacji radiowej, która jest systemem komunikacji krótkiego zasięgu. Polecenia są przesyłane za pomocą nadajnika i odbierane przez odbiornik wbudowany w obwód robota w celu sterowania ruchem robota.

Schemat blokowy sekcji nadajnika
Nadajnik składa się z zestawu przycisków, takich jak przód, tył, stop, lewo i prawo, które są naciskane w celu zapewnienia ruchu robota w dowolnym pożądanym kierunku. Przyciski są podłączone do portu wejściowego mikrokontrolera. Mikrokontroler po odebraniu tych sygnałów generuje odpowiedni 4-bitowy sygnał równolegle w innym porcie I / O, do którego podłączony jest układ scalony kodera. Enkoder konwertuje te sygnały na szeregową postać danych. Nadajnik RF moduluje te dane szeregowe, które są przesyłane przez antenę.

Schemat blokowy sekcji odbiornika
Sekcja odbiornika zamontowana na robocie składa się z odbiornika RF, który demoduluje ten sygnał. Układ scalony dekodera odbiera ten sygnał w postaci szeregowej i wytwarza na swoim wyjściu odpowiednie 4-bitowe równoległe dane. Mikrokontroler odbiera te dane i odpowiednio dostarcza sygnał sterujący do sterownika silnika IC LM293D, który napędza oba silniki.
Zrobotyzowany pojazd gaśniczy:
Pojęcie automatyczny pojazd strażacki walczy w ogniu. W ostatnich latach miało miejsce kilka poważnych wypadków, w tym pożary i wybuchy bomb. Wiedzieliśmy o poważnych wypadkach pożarowych, takich jak elektrownie jądrowe, ropa naftowa, zbiorniki gazu i fabryki chemiczne, duże przedsiębiorstwa przeciwpożarowe w tych miejscach, które kiedyś rozpoczęły pożar, mogą skutkować bardzo poważnymi. W wyniku tego zdarzenia zginęły tysiące ludzi. To jest walka z ogniem pojazd robotyczny technologia. Ten robot-pojazd służył do wykrywania pożarów i gaszenia pożarów.

Zrobotyzowany pojazd gaśniczy
Zasada działania robota przeciwpożarowego:
Pojazd robota załadowany cysterną z wodą. Pompa jest sterowana za pomocą komunikacji bezprzewodowej (komunikacja radiowa i mobilna). Końcówka nadajnika podłączona do przycisków. Za pomocą tego przycisku polecenia wysyłane są do odbiornika i kontrolują moment robota jak do przodu, do tyłu, w lewo, w prawo. Do mikrokontrolera podłączone są trzy silniki końca odbiorczego.

Schemat blokowy nadajnika

Schemat blokowy odbiornika
Nadajnik RF działa jako pilot zdalnego sterowania RF o zasięgu 200 metrów. W domu, biurach i przemyśle czujniki przeciwpożarowe są przechowywane w określonych miejscach, gdy w pobliżu czujnika pożarowego wystąpi pożar. Czujniki wyczuwają, że odpowiedni bit jest przesyłany do odbiornika RF. Odbiornik RF jest zintegrowany z mikrokontrolerem. Kiedy odbiornik RF odbiera sygnały, że informacja jest przekazywana do mikrokontrolera, robot porusza się w kierunku czujników przeciwpożarowych. Lokalizacje czujników są przechowywane w mikrokontrolerze. Gdy robot osiągnie żądane miejsce, robot zatrzymuje się i uruchamia opryskiwacz do tego ognia. Po odpaleniu robot przechodzi do pozycji wyjściowej. Całością steruje mikrokontroler.
Rodzaje robotów przeciwpożarowych:
Domowy robot strażacki :
Akcja pola jest ograniczona do obecnego Flore of house. Ten robot używa wielu artykułów gospodarstwa domowego do zapalenia się, gdy ktoś śpi lub nie ma go w domu. Ten robot służy do zabezpieczania domu i za pomocą tej aplikacji wszystkie drzwi są otwierane we Flore, ponieważ ten pojazd przemieszcza się z jednego miejsca do innego miejsca w domu. Miejsce gaszenia pożaru musi być bezpieczne, aby nie spowodować nowego wypadku. Dodatkową cechą tego robota jest operowanie na duże odległości.
Gaszenie pożarów przemysłowych:
Większość gałęzi przemysłu boryka się z problemami związanymi z pożarami, takimi jak gaz, benzyna, elektrownie jądrowe, przemysł chemiczny, ogromne ilości szkód i więcej ludzi ginie w pobliżu okolicznych obszarów. Ten robot ma siłę, by przenosić ogień wewnątrz płonącego obszaru, dostarczając nieograniczoną ilość wody. Ogień powoduje obniżoną widoczność, ekstremalne ciepło i wiele innych sytuacji, które mogą prowadzić do obrażeń.
Zwalczanie pożarów lasów:
Pożary lasów są bardzo niebezpieczne. Może to być krótkotrwałe spalenie dużej powierzchni leśnej. Nawet miejska straż pożarna musi radzić sobie z pożarami lasów na terenie otaczającym miasto. Kilka lat temu w latach 90. zginęło około 152 strażaków. Roboty przeciwpożarowe lasów używają do podpalania i gaszenia ognia. Ten robot wykorzystuje zewnętrzne urządzenie sterujące do celów komunikacji bezprzewodowej. Moduł połączony jest z końcem wyjściowym, którego wyjście służy do gaszenia lasu robota. Aplikacje takie jak czujnik ciśnienia, czujnik temperatury, czujnik smogu, czujnik podczerwieni, służą do sterowania robotem gaśniczym.
Na znak zachęty!
Chociaż przedstawiłem podstawową koncepcję robota z wykrywaczem metalu, nadal istnieje główne pytanie - jak kierować robotem na nierównych terenach, które są nieznane, szczególnie w środowiskach narażonych na ulewne deszcze, zapylenie i gorący zakres temperatur. Aby znaleźć odpowiedź i zamieścić swoje komentarze.