Wybieranie odpowiedni silnik do różnych zastosowań zależy od niektórych kryteriów projektowych, takich jak wymagania dotyczące dokładności położenia, koszt, dostępność mocy napędowej, wymagania dotyczące momentu obrotowego i przyspieszenia. Ogólnie rzecz biorąc, silniki takie jak silniki prądu stałego, serwomotory i silniki krokowe są najlepsze do różnych zastosowań. Ale silnik krokowy jest dobrze przystosowany do zastosowań z wysokim momentem trzymania i mniejszym przyspieszeniem. Wiele osób nie rozumie, że istnieje ogromna różnica między silnikiem prądu stałego, silnikiem serwo i silnikiem krokowym. Aby poznać różnice między tymi trzema silnikami, w tym artykule podano krótką różnicę między tymi trzema silnikami.
Różnica między silnikiem prądu stałego, serwomotorem i silnikiem krokowym
Wybór między silnikiem prądu stałego, serwomotorem i silnikiem krokowym może być nie lada zadaniem, w tym wyważenie wielu czynników projektowych, a mianowicie kosztów, prędkości, momentu obrotowego, przyspieszenia, a także obwodów napędowych, wszystkie odgrywają kluczową rolę w wyborze najlepszego silnik elektryczny do twojego zastosowania.
Silniki DC
Silnik prądu stałego to dwuprzewodowy silnik o ciągłej rotacji, a dwa przewody to zasilanie i uziemienie. Po podłączeniu zasilania silnik prądu stałego zacznie się obracać, aż do odłączenia zasilania. Większość silników prądu stałego pracuje z wysokimi obrotami na minutę (RPM), na przykład wentylatory używane w komputerach do chłodzenia lub koła samochodowe sterowane radiowo.

Silnik prądu stałego
Prędkość silnika prądu stałego można kontrolować za pomocą techniki PWM (modulacji szerokości impulsu), techniki szybkiego pulsowania włączania i wyłączania zasilania. Procent czasu poświęconego na cykliczne włączanie / wyłączanie współczynnika określa prędkość silnika. Np. jeśli moc jest napędzana przy 50%, silnik prądu stałego będzie obracał się z połową prędkości 100%. Każdy impuls jest tak szybki, że silnik wydaje się obracać bez przerwy i bez żadnych wahań! Skorzystaj z linku, aby dowiedzieć się więcej Praca silnika prądu stałego, zalety i wady
Serwomotory
Ogólnie rzecz biorąc, serwomotor to połączenie czterech rzeczy, a mianowicie silnika prądu stałego, obwodu sterującego, zestawu przekładni, a także potencjometru, zwykle czujnika położenia.
Pozycją serwomotoru można sterować dokładniej niż w przypadku typowych silników prądu stałego i generalnie mają one trzy przewody, takie jak zasilanie, GND i sterowanie. Moc do tych silników jest podawana w sposób ciągły, z obwodem sterującym serwomotoru zmieniającym pobór, aby napędzać silnik serwo. Silniki te są przeznaczone do bardziej precyzyjnych zadań, w których pozycja silnika musi być wyraźna, na przykład poruszanie ramieniem robota lub sterowanie sterem na łodzi lub nogą robota w określonym zakresie.

Siłownik
Silniki te nie pracują naprzemiennie tak łatwo, jak standardowy silnik prądu stałego. W jego miejsce kąt obrotu jest częściowy do 1800. Serwomotory uzyskują sygnał sterujący, który oznacza położenie o / p i doprowadzają moc do silnika prądu stałego, aż wałek znajdzie się w dokładnym położeniu, określonym przez czujnik położenia.
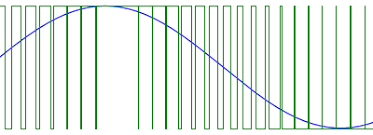
PWM (modulacja szerokości impulsu) służy do sterowania sygnałem serwomotoru. Ale w przeciwieństwie do silników prądu stałego to okres dodatniego impulsu kontroluje nieco położenie wału serwomechanizmu, a nie prędkość. Wartość impulsu neutralnego zależy od tego, czy serwo utrzymuje wałek serwomotoru w pozycji środkowej. Zwiększenie wartości impulsu spowoduje obrót serwomotoru zgodnie z ruchem wskazówek zegara, a krótszy impuls przełączy wał w kierunku przeciwnym do ruchu wskazówek zegara.
Impuls sterujący serwomechanizmem jest zwykle powtarzany co 20 ms, zasadniczo mówiąc serwomotorowi, gdzie ma iść, nawet jeśli oznacza to pozostawanie w podobnej pozycji. Kiedy serwomechanizm zostanie wydany na polecenie ruchu, przesunie się do pozycji i utrzyma tę pozycję, nawet jeśli siła zewnętrzna naciska na nie. Serwomotor będzie walczył z wyjściem z tej pozycji, przy czym maksymalna siła rezystancyjna, jaką może wykorzystać serwomotor, jest wartością znamionową tego serwomechanizmu.Zapoznaj się z linkiem, aby dowiedzieć się więcej Działanie serwomotoru, zalety i wady
Silniki krokowe
Silnik krokowy to zasadniczo silnik serwo, który wykorzystuje inną metodę motoryzacji. Tam, gdzie silnik zawiera silnik prądu stałego o ciągłej rotacji i połączony obwód sterownika, silniki krokowe wykorzystują wiele elektromagnesów z karbami rozmieszczonymi wokół centralnego urządzenia w celu opisania położenia.
Silnik krokowy wymaga zewnętrznego obwodu sterującego, aby oddzielnie zasilać każdy elektromagnes i włączać wał silnika. Kiedy elektromagnes jest napędzany energią, przyciąga zęby urządzenia i podtrzymuje je, nieco przesunięte względem następnego elektromagnesu „B”. Gdy „A” jest wyłączone, a „B” włączone, urządzenie obraca się nieznacznie, aby ustawić się w jednej linii z „B” i wszędzie wokół koła, przy czym każdy elektromagnes wokół urządzenia po kolei zasila i odłącza, aby wykonać obrót. Każdy obrót od jednego elektromagnesu do drugiego nazywany jest „krokiem”, a zatem silnik może być uruchamiany dokładnie, wstępnie zdefiniowanymi kątami kroku, przez pełny obrót 3600.

Silnik krokowy
Silniki te są używane w dwóch odmianach, a mianowicie jednobiegunowe / bipolarne. Silniki bipolarne są najbardziej solidnymi typami silników i zwykle mają 4 lub 8 przewodów. Mają wewnątrz dwa układy cewek elektromagnetycznych, a stopniowanie jest osiągane przez zmianę kierunku prądu w cewkach. Silniki jednobiegunowe można rozpoznać po 5 przewodach, 6 przewodach lub nawet 8 przewodach, mają również 2 cewki, ale każdy z nich ma środkowy zaczep. Silniki te mogą pracować bez konieczności zmiany kierunku prądu w cewkach, co upraszcza elektronikę. Ale ponieważ ten zaczep służy do wzmocnienia tylko połowy każdej cewki naraz, zwykle mają one mniejszy moment obrotowy niż bipolarny.
Konstrukcja silnika krokowego może zapewnić stały moment trzymania bez konieczności uruchamiania silnika, pod warunkiem, że silnik jest używany w swoich granicach, nie pojawiają się błędy w umieszczeniu, ponieważ silniki te mają fizycznie zdefiniowane sytuacje. Dowiedz się więcej o Działanie silnika krokowego, zalety i wady
Plusy i minusy prądu stałego, serwomechanizmu i silnika krokowego
Zalety i wady silnika prądu stałego, silnika serwo i silnika krokowego obejmują następujące elementy.
- Silniki prądu stałego to szybkie silniki o ciągłej rotacji, używane głównie do wszystkiego, co wymaga wysokich obrotów na minutę (RPM). Na przykład koła samochodowe, wentylatory itp.
- Serwomotory mają wysoki moment obrotowy, szybki, dokładny obrót pod ograniczonym kątem. Ogólnie rzecz biorąc, wysokowydajna alternatywa dla silników krokowych, ale bardziej skomplikowana konfiguracja z dostrajaniem PWM. Nadaje się do ramion / nóg robotów lub sterowania sterem itp.
- Silniki krokowe są powolne, łatwe w konfiguracji, precyzyjne obracanie i sterowanie - Przewaga nad innymi silnikami, takimi jak serwomotory, w kontrolowaniu pozycji. Tam, gdzie silniki te wymagają mechanizmu sprzężenia zwrotnego i obwodów pomocniczych do sterowania lokalizacją, silnik ten ma kontrolę pozycyjną dzięki swojemu charakterowi obrotu poprzez ułamkowe dodawanie. Nadaje się do drukarek 3D i powiązanych urządzeń, w których pozycja ma zasadnicze znaczenie.
Tak więc chodzi o główną różnicę między silnikiem prądu stałego, silnikiem serwo i silnikiem krokowym z zaletami i wadami. Mamy nadzieję, że lepiej zrozumieliście tę koncepcję, a wszelkie wątpliwości dotyczące tej koncepcji lub realizacji jakichkolwiek projektów elektrycznych z wykorzystaniem silników prosimy o przekazanie cennych opinii, komentując w sekcji komentarzy poniżej. Oto pytanie do Ciebie, Jaka jest funkcja silnika?



![Sterowanie lampkami, wentylatorem za pomocą pilota od telewizora [Pełny schemat obwodu]](https://electronics.jf-parede.pt/img/3-phase-power/43/control-lights-fan-using-tv-remote-full-circuit-diagram-1.jpg)