Karmnik dla psów sterowany telefonem komórkowym to system karmienia zwierząt domowych i zwierząt, który umożliwia zdalne kontrolowane uzupełnianie karmy w kontenerze karmnika przez właściciela, bez konieczności fizycznej obecności na miejscu.
Moduł GSM i obwód podajnika psa oparty na Arduino są omówione w tym poście. System może być używany do obsługi mechanizmu karmnika dla psów za pośrednictwem telefonu komórkowego właściciela, kiedy tylko jest to wymagane.

Pomysł został zgłoszony przez Allana Guillermo za pośrednictwem jednego ze swoich komentarze
Wprowadzenie
Chociaż wszystkie gatunki zwierząt domowych są kochane, psy mają znacznie większe preferencje jako zwierzęta domowe, być może ze względu na ich wysoki poziom inteligencji i lojalności wobec właściciela.
Jednak przy dzisiejszych rosnących napiętych harmonogramach wielu właścicieli zwierząt domowych ma ogromne problemy z zarządzaniem zwierzętami w godzinach pracy.
Karmienie zwierzaka na czas staje się głównym problemem dla wszystkich zapracowanych właścicieli zwierząt domowych. Właściciele zwierząt często szukają możliwego rozwiązania, które może zapewnić, że ich zwierzęta nigdy nie będą zmuszane do głodu lub przechodzenia przez przedwczesne wzorce żywieniowe.
Aby rozwiązać ten problem, omawiany tutaj pomysł może dostarczyć bardzo potrzebnego rozwiązania każdemu, kto ma do czynienia z omówionym powyżej problemem.
Cel
Celem obwodu jest umożliwienie użytkownikowi zorientowania się, kiedy żywność w pojemniku jest pusta i uzupełnienie jej za pomocą szybkiego połączenia z jego telefonu komórkowego.
Dzięki takiemu udogodnieniu właściciele zwierząt nigdy nie będą musieli martwić się o terminowe dostarczanie karmy swoim pupilom, nawet gdy są poza domem.
Korzystanie z systemu Arduino opartego na GSM
W tej koncepcji a Moduł GSM służy jako odbiornik, który przyjmuje polecenie od telefonu komórkowego właściciela do wykonania praktycznej operacji, a także wysyła SMS-a zawsze, gdy zostanie wykryty odpowiedni problem.
Do budowy systemu będziemy potrzebować następujących jednostek:
1) Moduł GSM
2) Płytka Arduino
3) Kilka elektronicznych części zamiennych
4) Mechanizm silnika
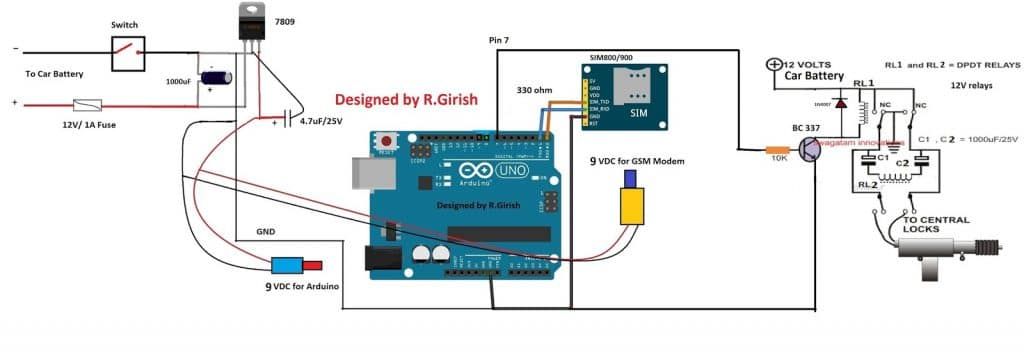
Schemat obwodu

Wykonanie etapu odbiornika GSM
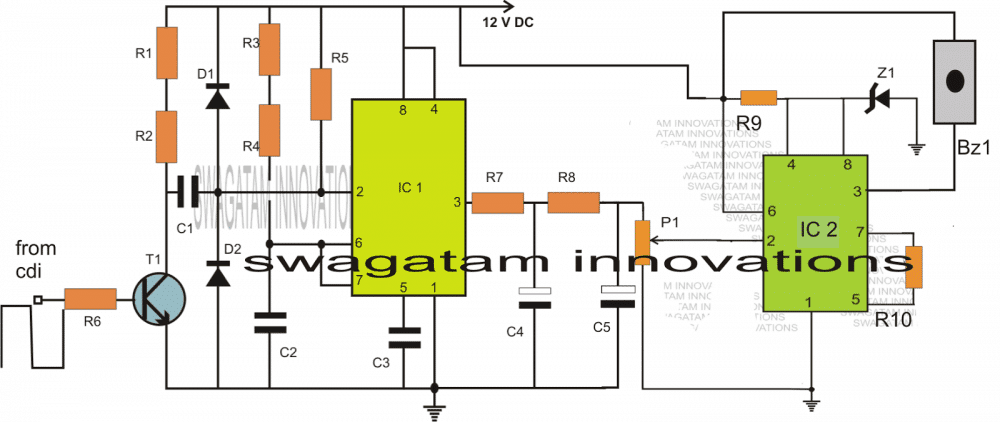
Powyższy schemat przedstawia obwód odbiornika GSM, wykorzystujący moduł GSM i przewód Płytka Arduino UNO.
Funkcją tego projektu jest odbieranie poleceń od właściciela telefonu komórkowego i obsługiwać załączony przekaźnik.
Ostatecznie przekaźnik włącza silnik lub elektromagnes w celu wykonania zamierzonej operacji podajnika dla psów.
Konfiguracja wygląda całkiem zrozumiale, z wyjątkiem włączenia kontaktronu.
Przekaźnik kontaktronowy służy do wykrywania obecności lub braku karmy dla psów w danym pojemniku.
Jak powinien być zorganizowany przekaźnik kontaktronowy
Kontaktron służy do wyzwalania sygnału + 5V (wysoki) lub 0V (niski) do pinu # 7 Arduino. Sygnał ten następnie skłania Arduino do wysłania wiadomości tekstowej na telefon komórkowy właściciela za pośrednictwem modułu GSM.
W ten sposób właściciel jest świadomy sytuacji, w której znajduje się żywność w pojemniku, czy jest on napełniony, czy pusty. W tej sytuacji właściciel szybko odsyła komendę do modułu GSM za pośrednictwem swojego telefonu komórkowego, aby uruchomić system podajnika, aby ponownie napełniał pojemnik jedzeniem.
Aby umożliwić działanie przekaźnika kontaktronowego, pojemnik na karmę dla psów będzie musiał zostać zmodyfikowany w taki sposób, aby przechylał się w dół lub naciskał o około cm, gdy jest załadowany karmą. I podnosi się lub przechyla w górę w przypadku braku obciążenia lub jedzenia.
Mały magnes wprowadzony po stronie przechylania zbliża się do kontaktronu, gdy pojemnik jest załadowany i odsuwa się, gdy pojemnik jest pusty.
W zależności od powyższych sytuacji kontaktron wysyła dodatni lub ujemny sygnał na pin nr 7 Arduino, zachęcając do wysłania wiadomości tekstowej do właściciela.
Jak może działać mechanizm motoryczny
Mechanizm silnikowy mógłby być umieszczony w taki sposób, że po uruchomieniu otwiera drzwi podajnika przez popchnięcie mechanizmu sprężynowego.
W tym czasie miska podajnika zaczyna się wypełniać, a jej waga ostatecznie powoduje, że kontaktron wysyła dodatni sygnał do Arduino.
W takiej sytuacji właściciel szybko otrzymuje wiadomość tekstową potwierdzającą napełnienie pojemnika na żywność.
W tym momencie użytkownik musi wysłać kolejne wezwanie do Arduino GSM, aby elektromagnes lub silnik powrócił do stanu pierwotnego zamykając drzwi podajnika.
Wyjaśniony powyżej mechanizm silnika i układ przekaźnika kontaktronowego można dostosować na wiele różnych sposobów, zgodnie z wygodą i przydatnością użytkownika.
Kod programu:
Kod programu jest taki sam, jak opisano w poniższym artykule.
Użyj kodu opisanego w dolnej części następującego artykułu, a nie pierwszego.
https://www.elprocus.com/2016/11/gsm-pump-motor-controller-using-arduino.html
Poprzedni: Nauka podstawowego programowania Arduino - samouczek dla nowicjuszy Dalej: Nauka podstaw półprzewodników