W tym poście dowiemy się o prostym obwodzie, który umożliwia ręczną regulację synchronizacji zapłonu CDI motocykla w celu uzyskania zapłonu wyprzedzającego, opóźnionego zapłonu lub po prostu normalnego zapłonu czasowego.
Po obszernych badaniach dotyczących tego tematu, najwyraźniej udało mi się zaprojektować ten obwód, który może być używany przez każdego motocyklistę w celu uzyskania zwiększonej prędkości i oszczędności paliwa poprzez regulację czasu zapłonu silnika pojazdu zgodnie z potrzebami, w zależności od jego chwilowej prędkości.
Regulacja zapłonu iskry
Wszyscy wiemy, że synchronizacja iskry zapłonowej generowanej w silniku pojazdu ma kluczowe znaczenie z punktu widzenia jego wydajności paliwowej, żywotności silnika i prędkości pojazdu, źle ustawione w czasie iskry CDI mogą spowodować słabo działający pojazd i odwrotnie.
Zalecany czas zapłonu dla iskry wewnątrz komory spalania to moment, w którym tłok znajduje się około 10 stopni po przekroczeniu punktu GMP (górnego martwego punktu). Cewka pobierająca jest dostrojona tak, aby odpowiadała temu i za każdym razem, gdy tłok osiąga tuż przed GMP, cewka pobierająca wyzwala cewkę CDI, aby odpalić iskrę, określaną jako BTDC (przed górnym martwym punktem).
Spalanie wykonane powyższym procesem generalnie zapewnia dobre funkcjonowanie silnika i emisje.
Jednak powyższe działa dobrze tylko wtedy, gdy silnik pracuje z pewną zalecaną średnią prędkością, ale w przypadku motocykli zaprojektowanych do osiągania nadzwyczajnych prędkości powyższy pomysł zaczyna działać nieprawidłowo i motocykl nie może osiągnąć określonych dużych prędkości.
Synchronizacja czasu iskry z różnymi prędkościami
Dzieje się tak, ponieważ przy wyższych prędkościach tłok porusza się znacznie szybciej, niż może to przewidzieć iskra zapłonowa. Chociaż obwód CDI prawidłowo inicjuje wyzwalanie i próbuje uzupełnić położenie tłoka, zanim iskra jest w stanie zapalić się na świecy zapłonowej, tłok przebył już znacznie przed GMP, powodując niepożądany scenariusz spalania w silniku. To z kolei prowadzi do nieefektywności, uniemożliwiając silnikowi osiągnięcie określonych wyższych ograniczeń prędkości.
Dlatego, aby skorygować czas zapłonu, musimy nieco przyspieszyć zapłon świecy zapłonowej, wydając polecenie nieco zaawansowanego spustu dla obwodu CDI, a dla mniejszych prędkości wystarczy to po prostu odwrócić, a zapłon najlepiej jest lekko opóźnić. umożliwiając optymalną wydajność silnika pojazdu.
Omówimy wszystkie te parametry znacznie szczegółowo w innym artykule, w tej chwili chcielibyśmy przeanalizować metodę, która pozwoliłaby nam na ręczne dostosowanie czasu zapłonu do przyspieszenia, opóźnienia lub normalnej pracy zgodnie z prędkością motocykla.
Czas odbioru może nie być wystarczająco wiarygodny
Z powyższej dyskusji możemy wywnioskować, że wyzwalacz cewki odbiorczej staje się niezawodny nie tylko w przypadku szybkich motocykli, a niektóre środki zwiększania sygnału odbioru stają się konieczne.
Zwykle odbywa się to za pomocą mikrokontrolerów, to samo próbowałem osiągnąć przy użyciu zwykłych komponentów, najwyraźniej wygląda to na logicznie wykonalny projekt, chociaż tylko praktyczny test może potwierdzić jego użyteczność.

Projektowanie elektronicznego procesora opóźnionego CDI Advance
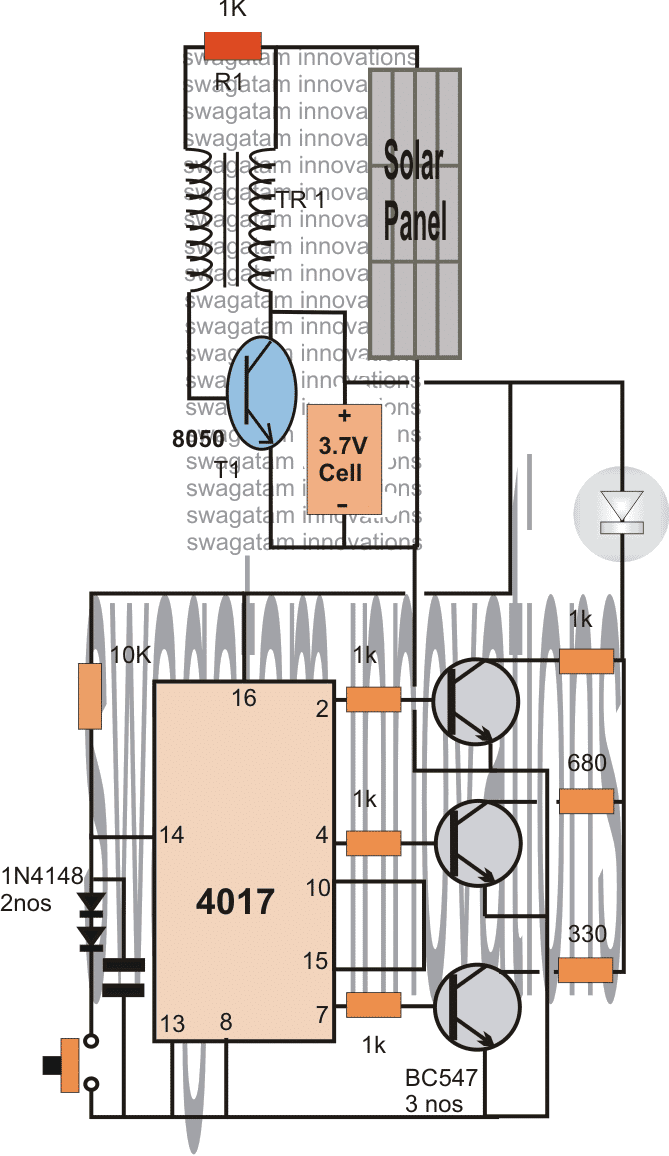
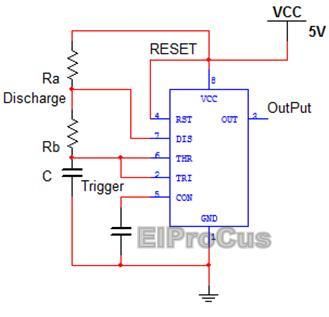
Odnosząc się do powyższego projektu proponowanego regulowanego obwodu wyprzedzenia zapłonu i opóźnienia zapłonu CDI, możemy zobaczyć zwykły układ IC 555 i obwód IC 4017, które są ustawione w standardzie. Obwód światła chaser LED 'tryb.
IC 555 jest ustawiony jak astable, który wytwarza i dostarcza impulsy zegarowe do pinu nr 14 układu IC 4017, który z kolei odpowiada na te impulsy i wytwarza `` skaczącą '' wysoką logikę na swoich wyjściowych pinach, zaczynając od pinu nr 3 do pinu nr 11 a potem z powrotem do pinu # 3.
Kilka BJT NPN / PNP można zobaczyć po lewej stronie schematu, są one ustawione tak, aby zresetować dwa układy scalone w odpowiedzi na sygnały otrzymane z cewki odbiorczej motocykla.
Sygnał cewki pobierającej jest podawany do podstawy NPN, co zachęca układy scalone do zresetowania i ponownego uruchomienia oscylacji za każdym razem, gdy cewka pobierająca wykryje pełny obrót przez skojarzone koło zamachowe.
Optymalizacja częstotliwości IC 555
Teraz częstotliwość IC 555 jest regulowana w taki sposób, że zanim cewka odbiorcza wykryje jeden obrót i zresetuje układy scalone, układ scalony 555 jest w stanie wytworzyć około 9 do 10 impulsów, umożliwiając układowi IC 4017 renderowanie wysokiego sygnału aż do jego pinu # 11 lub przynajmniej do jego wyprowadzenia # 9.
Powyższe można ustawić na obroty odpowiadające prędkości biegu jałowego motocykla.
Oznacza to, że podczas biegu jałowego sygnały cewki odbiorczej umożliwiałyby wyjściom 4017 przejście przez prawie wszystkie wyprowadzenia, aż do ponownego zresetowania do pinu # 3.
Jednak teraz spróbujmy zasymulować, co by się stało przy wyższych prędkościach.
Reakcja przy wyższej prędkości pojazdu
Przy wyższych prędkościach sygnały odbiorcze wytwarzałyby szybsze sygnały niż normalne ustawienie, co z kolei uniemożliwiłoby IC 555 wygenerowanie wymaganych 10 impulsów, więc może teraz być w stanie wygenerować powiedzmy około 7 impulsów lub 6 impulsów przy jednym biorąc pod uwagę większą prędkość pojazdu.
To z kolei uniemożliwiłoby IC 4017 włączenie wysokiego poziomu wyjściowego, zamiast tego teraz byłby w stanie przewodzić tylko do pinu # 6 lub pinu # 5, po czym przetwornik zmusiłby układ scalony do zresetowania.
Dzielenie koła zamachowego na 10 działów Advance / Retard
Z powyższej dyskusji możemy zasymulować sytuację, w której przy prędkościach jałowych, wyjścia układu 4017 IC dzieli obrót koła zamachowego przetwornika na 10 działek, przy czym dolne 3 lub 4 sygnały pinout można uznać za odpowiadające sygnałom, które mogą być występujące tuż przed rzeczywistym sygnałem wyzwalającym cewkę odbiorczą, podobnie można zasymulować wysoką logikę wyprowadzeń na pinie # 2, 4, 7, aby były to sygnały pojawiające się tuż po tym, jak minie rzeczywiste wyzwolenie cewki odbiorczej.
Dlatego możemy założyć, że sygnały na dolnych pinach układu IC 4017 „przyspieszają” rzeczywiste sygnały przetwornika.
Ponadto, ponieważ resetowanie z przetwornika popycha IC 4017 wysoko do jego styku # 3, można założyć, że ten pinout odpowiada normalnemu `` zalecanemu '' wyzwalaczowi przetwornika ... podczas gdy styki, które następują za pinem # 3, to znaczy można założyć, że wyprowadzenia2, 4, 7 są sygnałami odpowiadającymi późnym sygnałom lub sygnałom „opóźnionym” w odniesieniu do rzeczywistych wyzwalaczy.
Jak skonfigurować obwód
W tym celu musimy najpierw znać czas wymagany przez sygnał wzbudzający do wygenerowania każdego naprzemiennego impulsu.
Załóżmy, że nagrywasz około 100 milisekund (dowolna wartość), co oznaczałoby, że układ scalony 555 musi wytwarzać impulsy na swoim pinie nr 3 z szybkością 100/9 = 11,11 ms.
Po ustawieniu tego możemy w przybliżeniu założyć, że wyjścia 4017 wytwarzają wysoką logikę na wszystkich wyjściach, która stopniowo `` zanika '', gdy sygnały odbioru stają się coraz szybsze w odpowiedzi na prędkość pojazdu.
Spowodowałoby to cofanie się `` wysokiej '' logiki na dolnych pinoutach IC 4017, dlatego przy wyższych prędkościach kierowca miałby możliwość ręcznego uciekania się do niższych zestawów pinów do wyzwalania cewki CDI, jak pokazano na schemacie (patrz opcje przełącznika wyboru).
Na rysunku widzimy przełącznik selektora, który może być użyty do wyboru wyzwalaczy pinout z IC 4017 IC do wyzwalania cewki CDI.
Jak wyjaśniono powyżej, po wybraniu dolnego zestawu cofających się wysokich układów logicznych wyprowadzeń, umożliwiłoby wyzwalanie z wyprzedzeniem cewki CDI, a tym samym pozwoliłoby kierowcy na osiągnięcie samoregulującego się automatycznego wyzwalania wyprzedzającego cewki CDI, jednak należy to wybrać tylko wtedy, gdy pojazd porusza się znacznie powyżej zalecanej normalnej prędkości.
Podobnie, jeśli kierowca rozważa niższą prędkość pojazdu, może przełączyć przełącznik w celu wybrania opcji opóźnionego rozrządu, dostępnej na pinoutach, które znajdują się tuż za pinem nr 3 IC 4017.
Przy zalecanych normalnych prędkościach motocyklista może wybrać styk nr 3 jako wyjście wyzwalające dla CDI, co pozwoliłoby pojazdowi cieszyć się wydajną jazdą przy danych normalnych prędkościach.
Powyższa teoria czasu wyprzedzenia / opóźnienia została zainspirowana wyjaśnieniem przedstawionym w następującym filmie:
Oryginalny link do filmu, który można obejrzeć na Youtube, znajduje się poniżej:
Jak zautomatyzować powyższą koncepcję
W następnym rozdziale poznamy metodę aktualizacji powyższej koncepcji do wersji automatycznej za pomocą obrotomierza i stopni obwodu opampa. Pomysł został zamówiony przez pana Mike'a, a zaprojektowany przez pana ABU-Hafss.
Specyfikacja techniczna
Pozdrowienia!
Ciekawe rzeczy tutaj, obecnie układam ślady w CAD i chciałbym to wytrawić na jakiejś płytce drukowanej, ale wolałbym, aby wybór zaawansowanego standardu lub opóźnionego pozostawiono elektronice ...
Jestem w tym trochę nowy, ale czuję, że dobrze rozumiem koncepcje w grze ...
moje pytanie brzmi: czy są jakieś artykuły na temat automatyzacji wyboru z wyprzedzeniem w oparciu o obroty silnika? och, a lista części różnych komponentów byłaby spektakularna ???
Dzięki, Mike
Projekt autorstwa Abu-Hafssa
Cześć Swagatam
Nawiązując do Twojego artykułu na zaawansowana, opóźniająca zapłon iskra CDI w celu zwiększenia wydajności motocykla przy dużej prędkości Chciałbym skomentować, że nie spotkałem się jeszcze z żadną sytuacją, w której wymagane jest ZWOLNIENIE (a dokładniej OPÓŹNIENIE) odpalenia iskier. Jak wspomniałeś, przeważnie motocykle (wyścigowe) nie działają na wysokich obrotach (zazwyczaj powyżej 10 000 obr / min), więc wymagane jest przyspieszenie zapłonu iskrowego. Miałem prawie ten sam pomysł, ale nie mogłem przetestować fizycznie.
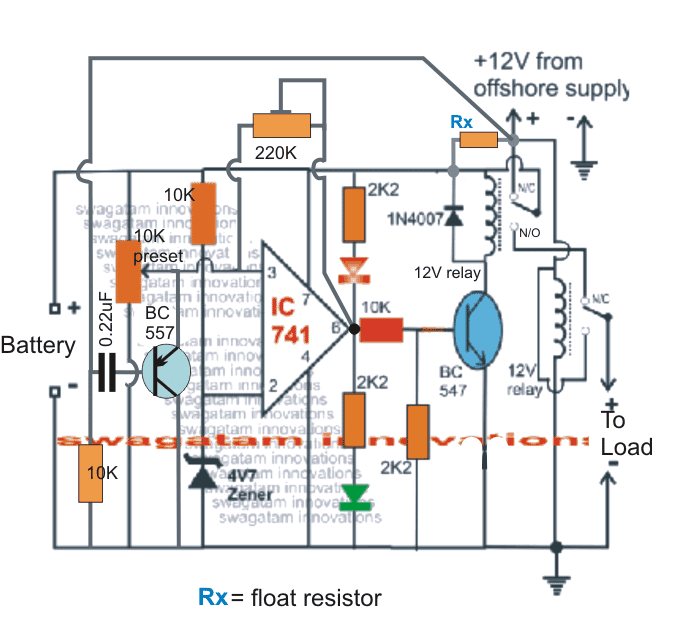
Oto mój proponowany dodatek do twojego obwodu:
Aby zautomatyzować przełączanie iskry zapłonowej między NORMAL i ADVANCE, a obwód obrotomierza może być używany z kilkoma innymi komponentami. Woltomierz z obwodu obrotomierza jest usuwany, a wyjście jest podawane na pin nr 2 układu scalonego LM741, który jest używany jako komparator. Napięcie odniesienia 10 V jest przypisane do pinu nr 3. Obwód tachometru jest zaprojektowany tak, aby dawał 1 V przy 1000 obr / min, zatem 10 V odnosi się do 10000 obr / min. Gdy obroty są większe niż 10000, pin nr 2 ma więcej niż 10 V, a zatem wyjście 741 jest niskie (zero).
To wyjście jest podłączone do podstawy T2, stąd niskie wyjście włącza T2. Jeśli RPM spadnie poniżej 10 000, wyjście staje się wysokie i dlatego T2 wyłącza się. W tym samym czasie T4, który jest skonfigurowany jako falownik sygnału, zamienia wyjście na stan niski i to samo jest podłączone do bazy T3, a zatem T3 jest włączany.
pozdrowienia
Abu-Hafss

Poprzedni: Jak uzyskać darmową energię z wahadła Dalej: Wykonanie obwodu regulatora napięcia 3,3 V, 5 V z diodami i tranzystorami